




ເລເຊີທີ່ມີອັດຕາການຊ້ຳຊ້ຳສູງຫຼາຍ
ໃນໂລກຈຸລະທັດຂອງການພົວພັນລະຫວ່າງແສງ ແລະ ວັດຖຸ, ກຳມະຈອນອັດຕາການຊ້ຳຊ້ອນສູງພິເສດ (UHRPs) ເຮັດໜ້າທີ່ເປັນຕົວຄວບຄຸມເວລາທີ່ຊັດເຈນ - ພວກມັນສັ່ນສະເທືອນຫຼາຍກວ່າໜຶ່ງພັນລ້ານເທື່ອຕໍ່ວິນາທີ (1GHz), ຈັບເອົາລາຍນິ້ວມືໂມເລກຸນຂອງຈຸລັງມະເຮັງໃນການຖ່າຍພາບສະເປກຕຣຳ, ບັນຈຸຂໍ້ມູນຈຳນວນຫຼວງຫຼາຍໃນການສື່ສານເສັ້ນໄຍແກ້ວນຳແສງ, ແລະ ປັບທຽບພິກັດຄວາມຍາວຄື້ນຂອງດວງດາວໃນກ້ອງສ່ອງທາງໄກ. ໂດຍສະເພາະໃນການກ້າວກະໂດດຂອງມິຕິການກວດຈັບຂອງ lidar, ເລເຊີກຳມະຈອນອັດຕາການຊ້ຳຊ້ອນສູງພິເສດ terahertz (100-300 GHz) ກຳລັງກາຍເປັນເຄື່ອງມືທີ່ມີປະສິດທິພາບໃນການເຈາະເຂົ້າໄປໃນຊັ້ນແຊກແຊງ, ປັບປຸງຂອບເຂດຂອງການຮັບຮູ້ສາມມິຕິດ້ວຍພະລັງການຈັດການພື້ນທີ່ ແລະ ເວລາໃນລະດັບໂຟຕອນ. ໃນປະຈຸບັນ, ການໃຊ້ໂຄງສ້າງຈຸລະພາກທຽມ, ເຊັ່ນ: ຊ່ອງວົງແຫວນຈຸລະພາກທີ່ຕ້ອງການຄວາມແມ່ນຍຳໃນການປະມວນຜົນຂະໜາດນາໂນເພື່ອສ້າງການປະສົມສີ່ຄື້ນ (FWM), ແມ່ນໜຶ່ງໃນວິທີການຫຼັກໃນການໄດ້ຮັບກຳມະຈອນແສງອັດຕາການຊ້ຳຊ້ອນສູງພິເສດ. ນັກວິທະຍາສາດກຳລັງສຸມໃສ່ການແກ້ໄຂບັນຫາດ້ານວິສະວະກຳໃນການປະມວນຜົນໂຄງສ້າງທີ່ມີຄວາມລະອຽດສູງພິເສດ, ບັນຫາການປັບແຕ່ງຄວາມຖີ່ໃນລະຫວ່າງການເລີ່ມຕົ້ນກຳມະຈອນ, ແລະ ບັນຫາປະສິດທິພາບການປ່ຽນຫຼັງຈາກການສ້າງກຳມະຈອນ. ວິທີການອີກອັນໜຶ່ງແມ່ນການໃຊ້ເສັ້ນໄຍທີ່ບໍ່ເປັນເສັ້ນຊື່ສູງ ແລະ ນຳໃຊ້ຜົນກະທົບຄວາມບໍ່ສະຖຽນລະພາບຂອງການມອດູເລຊັນ ຫຼື ຜົນກະທົບ FWM ພາຍໃນຊ່ອງເລເຊີເພື່ອກະຕຸ້ນ UHRPs. ມາຮອດປະຈຸບັນ, ພວກເຮົາຍັງຕ້ອງການ "ຕົວກຳນົດເວລາ" ທີ່ມີຄວາມຊຳນານຫຼາຍກວ່າ.
ຂະບວນການສ້າງ UHRP ໂດຍການສີດກະແສໄຟຟ້າໄວຫຼາຍເພື່ອກະຕຸ້ນຜົນກະທົບຂອງ FWM ທີ່ກະຈາຍໄປໄດ້ຖືກອະທິບາຍວ່າເປັນ "ການຈູດໄວຫຼາຍ". ແຕກຕ່າງຈາກໂຄງການຊ່ອງຈຸລະພາກທຽມທີ່ໄດ້ກ່າວມາຂ້າງເທິງ ເຊິ່ງຕ້ອງການການສູບຢ່າງຕໍ່ເນື່ອງ, ການປັບຕົວທີ່ຊັດເຈນຂອງ detuning ເພື່ອຄວບຄຸມການສ້າງກະແສໄຟຟ້າ, ແລະ ການໃຊ້ສື່ທີ່ບໍ່ເປັນເສັ້ນຊື່ສູງເພື່ອຫຼຸດຂອບເຂດ FWM, "ການຈູດ" ນີ້ອີງໃສ່ລັກສະນະພະລັງງານສູງສຸດຂອງກະແສໄຟຟ້າໄວຫຼາຍເພື່ອກະຕຸ້ນ FWM ໂດຍກົງ, ແລະ ຫຼັງຈາກ "ການຈູດປິດ", ບັນລຸ UHRP ທີ່ຍືນຍົງດ້ວຍຕົນເອງ.
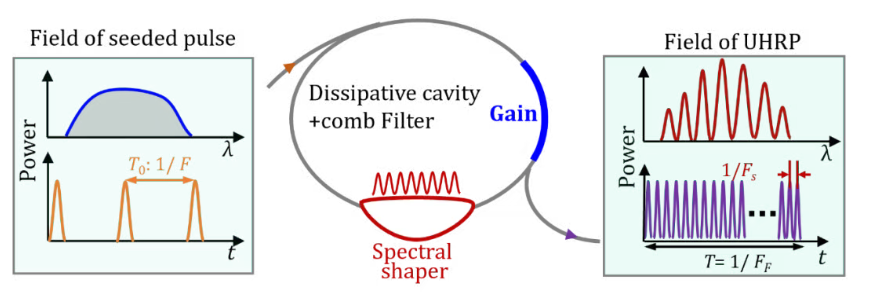
ຮູບທີ 1 ສະແດງໃຫ້ເຫັນກົນໄກຫຼັກຂອງການບັນລຸການຈັດລະບຽບດ້ວຍຕົນເອງຂອງກຳມະຈອນໂດຍອີງໃສ່ການກະຕຸ້ນກຳມະຈອນເມັດທີ່ໄວຫຼາຍຂອງຊ່ອງວົງແຫວນເສັ້ນໄຍກະຈາຍ. ກຳມະຈອນເມັດທີ່ສັ້ນຫຼາຍທີ່ຖືກສີດເຂົ້າພາຍນອກ (ໄລຍະເວລາ T0, ຄວາມຖີ່ຊ້ຳ F) ເຮັດໜ້າທີ່ເປັນ "ແຫຼ່ງຈູດໄຟ" ເພື່ອກະຕຸ້ນສະໜາມກຳມະຈອນພະລັງງານສູງພາຍໃນຊ່ອງກະຈາຍ. ໂມດູນເພີ່ມພາຍໃນຈຸລັງເຮັດວຽກຮ່ວມກັນກັບຕົວສ້າງຮູບຮ່າງສະເປກຕຣຳເພື່ອປ່ຽນພະລັງງານກຳມະຈອນເມັດເປັນການຕອບສະໜອງສະເປກຕຣຳຮູບຊົງຫວີຜ່ານການຄວບຄຸມຮ່ວມກັນໃນໂດເມນຄວາມຖີ່ເວລາ. ຂະບວນການນີ້ທຳລາຍຂໍ້ຈຳກັດຂອງການສູບນ້ຳຢ່າງຕໍ່ເນື່ອງແບບດັ້ງເດີມ: ກຳມະຈອນເມັດຈະປິດເມື່ອມັນຮອດຂອບເຂດການກະຈາຍ FWM, ແລະຊ່ອງກະຈາຍຮັກສາສະຖານະພາບການຈັດລະບຽບດ້ວຍຕົນເອງຂອງກຳມະຈອນຜ່ານຄວາມສົມດຸນແບບໄດນາມິກຂອງການໄດ້ຮັບ ແລະ ການສູນເສຍ, ໂດຍຄວາມຖີ່ຊ້ຳຂອງກຳມະຈອນແມ່ນ Fs (ກົງກັບຄວາມຖີ່ພາຍໃນ FF ແລະໄລຍະເວລາ T ຂອງຊ່ອງກະຈາຍ).
ການສຶກສານີ້ຍັງໄດ້ດຳເນີນການກວດສອບທາງທິດສະດີ. ໂດຍອີງໃສ່ຕົວກຳນົດທີ່ນຳໃຊ້ໃນການຕັ້ງຄ່າການທົດລອງ ແລະ ດ້ວຍ 1psເລເຊີກຳມະຈອນໄວພິເສດໃນຖານະເປັນພາກສະໜາມເບື້ອງຕົ້ນ, ການຈຳລອງຕົວເລກໄດ້ຖືກປະຕິບັດກ່ຽວກັບຂະບວນການວິວັດທະນາການຂອງໂດເມນເວລາ ແລະ ຄວາມຖີ່ຂອງກຳມະຈອນພາຍໃນຊ່ອງເລເຊີ. ພົບວ່າກຳມະຈອນໄດ້ຜ່ານສາມຂັ້ນຕອນຄື: ການແຍກກຳມະຈອນ, ການສັ່ນສະເທືອນຂອງກຳມະຈອນ, ແລະ ການແຈກຢາຍເອກະພາບຂອງກຳມະຈອນຕະຫຼອດຊ່ອງເລເຊີທັງໝົດ. ຜົນໄດ້ຮັບຕົວເລກນີ້ຍັງຢືນຢັນຢ່າງຄົບຖ້ວນກ່ຽວກັບລັກສະນະການຈັດລະບຽບຕົນເອງຂອງເລເຊີຊີບພັລສ໌.
ໂດຍການກະຕຸ້ນຜົນກະທົບຂອງການປະສົມສີ່ຄື້ນພາຍໃນຊ່ອງວົງແຫວນເສັ້ນໄຍກະຈາຍຜ່ານການຈູດໄຟຟ້າດ້ວຍກຳມະຈອນເມັດພັນທີ່ໄວຫຼາຍ, ການສ້າງ ແລະ ການຮັກສາກຳມະຈອນຄວາມຖີ່ຊ້ຳຊ້ອນສູງພິເສດພາຍໃຕ້ THZ (ຜົນຜະລິດທີ່ໝັ້ນຄົງຂອງພະລັງງານ 0.5W ຫຼັງຈາກເມັດພັນປິດ) ໄດ້ບັນລຸຜົນສຳເລັດ, ສະໜອງແຫຼ່ງແສງສະຫວ່າງປະເພດໃໝ່ສຳລັບສະໜາມ lidar: ຄວາມຖີ່ຊ້ຳຊ້ອນລະດັບລຸ່ມ THZ ຂອງມັນສາມາດເພີ່ມຄວາມລະອຽດຂອງຈຸດຄລາວໃຫ້ເຖິງລະດັບມິນລິແມັດ. ຄຸນສົມບັດການຮອງຮັບກຳມະຈອນດ້ວຍຕົນເອງຊ່ວຍຫຼຸດຜ່ອນການໃຊ້ພະລັງງານຂອງລະບົບໄດ້ຢ່າງຫຼວງຫຼາຍ. ໂຄງສ້າງເສັ້ນໄຍທັງໝົດຮັບປະກັນການເຮັດວຽກທີ່ມີຄວາມໝັ້ນຄົງສູງໃນແຖບຄວາມປອດໄພຂອງຕາ 1.5 μm. ເມື່ອເບິ່ງໄປຂ້າງໜ້າ, ເຕັກໂນໂລຊີນີ້ຄາດວ່າຈະຊຸກຍູ້ວິວັດທະນາການຂອງ lidar ທີ່ຕິດຕັ້ງໃນຍານພາຫະນະໄປສູ່ການຫຍໍ້ຂະໜາດ (ໂດຍອີງໃສ່ຕົວກອງຂະໜາດນ້ອຍ MZI) ແລະ ການກວດຈັບໄລຍະໄກ (ການຂະຫຍາຍພະລັງງານເຖິງ > 1W), ແລະ ປັບຕົວເຂົ້າກັບຄວາມຕ້ອງການການຮັບຮູ້ຂອງສະພາບແວດລ້ອມທີ່ສັບສົນຜ່ານການຈູດໄຟຟ້າທີ່ປະສານງານກັບຫຼາຍຄື້ນ ແລະ ການຄວບຄຸມອັດສະລິຍະ.
ເວລາໂພສ: ກໍລະກົດ 08-2025