




ໂຟຕອນດຽວເຄື່ອງກວດຈັບແສງ InGaAs
ດ້ວຍການພັດທະນາຢ່າງວ່ອງໄວຂອງ LiDAR,ການກວດຈັບແສງເຕັກໂນໂລຊີ ແລະ ເຕັກໂນໂລຊີການວັດແທກຄວາມຖີ່ທີ່ໃຊ້ສຳລັບເຕັກໂນໂລຊີການຖ່າຍພາບຕິດຕາມຍານພາຫະນະອັດຕະໂນມັດຍັງມີຄວາມຕ້ອງການສູງກວ່າ, ຄວາມອ່ອນໄຫວ ແລະ ຄວາມລະອຽດຂອງເວລາຂອງເຄື່ອງກວດຈັບທີ່ໃຊ້ໃນເຕັກໂນໂລຊີການກວດຈັບແສງຕ່ຳແບບດັ້ງເດີມບໍ່ສາມາດຕອບສະໜອງຄວາມຕ້ອງການຕົວຈິງໄດ້. ໂຟຕອນດຽວແມ່ນຫົວໜ່ວຍພະລັງງານທີ່ນ້ອຍທີ່ສຸດຂອງແສງ, ແລະ ເຄື່ອງກວດຈັບທີ່ມີຄວາມສາມາດໃນການກວດຈັບໂຟຕອນດຽວແມ່ນເຄື່ອງມືສຸດທ້າຍຂອງການກວດຈັບແສງຕ່ຳ. ເມື່ອທຽບກັບ InGaAsເຄື່ອງກວດຈັບແສງ APD, ເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວໂດຍອີງໃສ່ເຄື່ອງກວດຈັບໂຟຕອນ APD InGaAs ມີຄວາມໄວໃນການຕອບສະໜອງ, ຄວາມອ່ອນໄຫວ ແລະ ປະສິດທິພາບສູງກວ່າ. ດັ່ງນັ້ນ, ການຄົ້ນຄວ້າຊຸດໜຶ່ງກ່ຽວກັບເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວຂອງເຄື່ອງກວດຈັບໂຟຕອນ APD IN-GAAS ໄດ້ຖືກດຳເນີນຢູ່ພາຍໃນ ແລະ ຕ່າງປະເທດ.
ນັກຄົ້ນຄວ້າຈາກມະຫາວິທະຍາໄລມິລານໃນປະເທດອີຕາລີ ໄດ້ພັດທະນາແບບຈຳລອງສອງມິຕິເພື່ອຈຳລອງພຶດຕິກຳຊົ່ວຄາວຂອງໂຟຕອນດຽວເຄື່ອງກວດຈັບແສງຫິມະຖະຫຼົ່ມໃນປີ 1997, ແລະ ໄດ້ໃຫ້ຜົນການຈຳລອງຕົວເລກຂອງຄຸນລັກສະນະຊົ່ວຄາວຂອງເຄື່ອງກວດຈັບແສງໂຟຕອນດຽວທີ່ມີຫິມະຖະຫຼົ່ມ. ຈາກນັ້ນໃນປີ 2006, ນັກຄົ້ນຄວ້າໄດ້ໃຊ້ MOCVD ເພື່ອກະກຽມຮູບຮ່າງເລຂາຄະນິດແບບຮາບພຽງເຄື່ອງກວດຈັບແສງ APD InGaAsເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວ, ເຊິ່ງເພີ່ມປະສິດທິພາບການກວດຈັບໂຟຕອນດ່ຽວເປັນ 10% ໂດຍການຫຼຸດຜ່ອນຊັ້ນສະທ້ອນແສງ ແລະ ເສີມຂະຫຍາຍສະໜາມໄຟຟ້າຢູ່ທີ່ອິນເຕີເຟດທີ່ບໍ່ເປັນເອກະພາບ. ໃນປີ 2014, ໂດຍການປັບປຸງເງື່ອນໄຂການແຜ່ກະຈາຍສັງກະສີຕື່ມອີກ ແລະ ການເພີ່ມປະສິດທິພາບໂຄງສ້າງແນວຕັ້ງ, ເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວມີປະສິດທິພາບການກວດຈັບສູງຂຶ້ນ, ສູງເຖິງ 30%, ແລະ ບັນລຸການສັ່ນສະເທືອນເວລາປະມານ 87 ps. ໃນປີ 2016, SANZARO M ແລະ ເພື່ອນຮ່ວມງານໄດ້ປະສົມປະສານເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວຂອງເຄື່ອງກວດຈັບໂຟຕອນ InGaAs APD ກັບຕົວຕ້ານທານປະສົມປະສານແບບ monolithic, ອອກແບບໂມດູນນັບໂຟຕອນດ່ຽວຂະໜາດກະທັດຮັດໂດຍອີງໃສ່ເຄື່ອງກວດຈັບ, ແລະ ສະເໜີວິທີການດັບໄຟແບບປະສົມທີ່ຫຼຸດຜ່ອນປະຈຸໄຟຟ້າຫິມະຢ່າງຫຼວງຫຼາຍ, ດັ່ງນັ້ນຈຶ່ງຫຼຸດຜ່ອນການລົບກວນຫຼັງການເຕັ້ນຂອງກະແສໄຟຟ້າ ແລະ ການສະທ້ອນແສງ, ແລະ ຫຼຸດຜ່ອນການສັ່ນສະເທືອນເວລາເປັນ 70 ps. ໃນເວລາດຽວກັນ, ກຸ່ມຄົ້ນຄວ້າອື່ນໆຍັງໄດ້ດຳເນີນການຄົ້ນຄວ້າກ່ຽວກັບ InGaAs APD.ເຄື່ອງກວດຈັບແສງເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວ. ຕົວຢ່າງ, Princeton Lightwave ໄດ້ອອກແບບເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວ InGaAs/InPAPD ທີ່ມີໂຄງສ້າງຮາບພຽງ ແລະ ນຳໄປໃຊ້ໃນການຄ້າ. ສະຖາບັນຟີຊິກເຕັກນິກຊຽງໄຮໄດ້ທົດສອບປະສິດທິພາບໂຟຕອນດ່ຽວຂອງເຄື່ອງກວດຈັບໂຟຕອນ APD ໂດຍໃຊ້ການກຳຈັດຕະກອນສັງກະສີ ແລະ ໂໝດກຳມະຈອນປະຕູທີ່ມີຄວາມສົມດຸນຂອງ capacitive ທີ່ມີຈຳນວນຄວາມມືດ 3.6 × 10 ⁻⁴/ns ທີ່ມີຄວາມຖີ່ກຳມະຈອນ 1.5 MHz. Joseph P ແລະ ເພື່ອນຮ່ວມງານໄດ້ອອກແບບໂຄງສ້າງ mesa ເຄື່ອງກວດຈັບໂຟຕອນດ່ຽວ InGaAs APD ທີ່ມີ bandgap ກວ້າງກວ່າ, ແລະ ໃຊ້ InGaAsP ເປັນວັດສະດຸຊັ້ນດູດຊຶມເພື່ອໃຫ້ໄດ້ຈຳນວນຄວາມມືດຕ່ຳລົງໂດຍບໍ່ມີຜົນກະທົບຕໍ່ປະສິດທິພາບຂອງການກວດຈັບ.
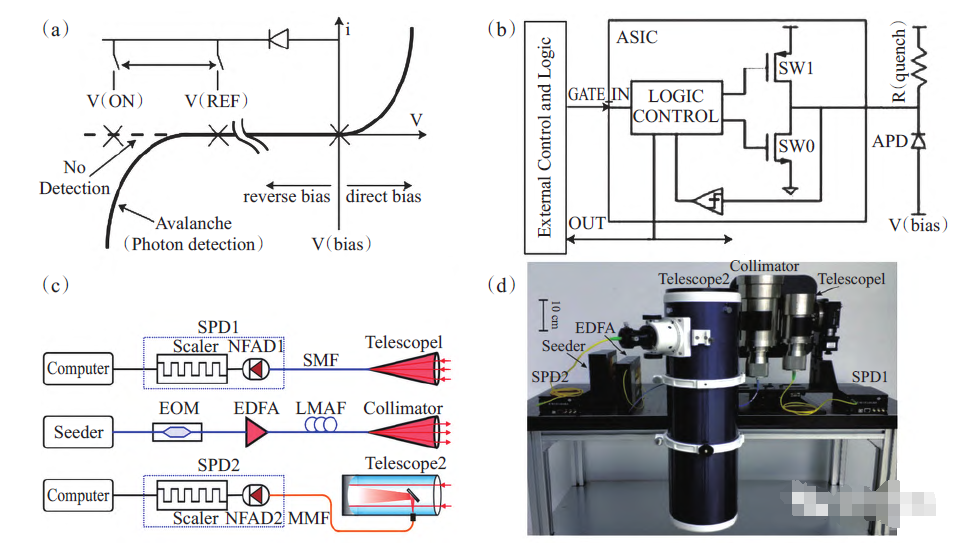
ຮູບແບບການເຮັດວຽກຂອງເຄື່ອງກວດຈັບໂຟຕອນດຽວຂອງ InGaAs APD ແມ່ນຮູບແບບການເຮັດວຽກແບບອິດສະຫຼະ, ນັ້ນຄື, ເຄື່ອງກວດຈັບໂຟຕອນ APD ຈຳເປັນຕ້ອງດັບວົງຈອນອຸປະກອນພາຍນອກຫຼັງຈາກເກີດຫິມະຖະຫຼົ່ມ, ແລະຟື້ນຕົວຫຼັງຈາກການດັບເປັນເວລາໜຶ່ງ. ເພື່ອຫຼຸດຜ່ອນຜົນກະທົບຂອງເວລາຊັກຊ້າຂອງການດັບ, ມັນແບ່ງອອກເປັນສອງປະເພດຄື: ໜຶ່ງແມ່ນການໃຊ້ວົງຈອນດັບແບບ passive ຫຼື active ເພື່ອບັນລຸການດັບ, ເຊັ່ນ: ວົງຈອນດັບແບບ active ທີ່ໃຊ້ໂດຍ R Thew, ແລະອື່ນໆ. ຮູບ (a), (b) ແມ່ນແຜນວາດແບບງ່າຍດາຍຂອງວົງຈອນຄວບຄຸມເອເລັກໂຕຣນິກ ແລະ ວົງຈອນດັບແບບ active ແລະການເຊື່ອມຕໍ່ຂອງມັນກັບເຄື່ອງກວດຈັບໂຟຕອນ APD, ເຊິ່ງໄດ້ຖືກພັດທະນາໃຫ້ເຮັດວຽກໃນຮູບແບບ gated ຫຼື free running, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນບັນຫາ post-pulse ທີ່ບໍ່ເຄີຍເກີດຂຶ້ນມາກ່ອນໄດ້ຢ່າງຫຼວງຫຼາຍ. ຍິ່ງໄປກວ່ານັ້ນ, ປະສິດທິພາບການກວດຈັບທີ່ 1550 nm ແມ່ນ 10%, ແລະຄວາມເປັນໄປໄດ້ຂອງການຫຼັງ-pulse ຫຼຸດລົງເຫຼືອໜ້ອຍກວ່າ 1%. ອັນທີສອງແມ່ນເພື່ອໃຫ້ບັນລຸການດັບ ແລະ ຟື້ນຕົວໄວໂດຍການຄວບຄຸມລະດັບແຮງດັນໄຟຟ້າອະຄະຕິ. ເນື່ອງຈາກມັນບໍ່ໄດ້ຂຶ້ນກັບການຄວບຄຸມການປ້ອນກັບຂອງກຳມະຈອນຫິມະຖະຫຼົ່ມ, ເວລາຊັກຊ້າຂອງການດັບໄຟຈະຫຼຸດລົງຢ່າງຫຼວງຫຼາຍ ແລະ ປະສິດທິພາບການກວດຈັບຂອງເຄື່ອງກວດຈັບກໍ່ໄດ້ຮັບການປັບປຸງ. ຕົວຢ່າງ, LC Comandar ແລະ ເພື່ອນຮ່ວມງານໃຊ້ໂໝດ gated. ເຄື່ອງກວດຈັບໂຟຕອນດຽວ gated ໂດຍອີງໃສ່ InGaAs/InPAPD ໄດ້ຖືກກະກຽມ. ປະສິດທິພາບການກວດຈັບໂຟຕອນດຽວແມ່ນຫຼາຍກວ່າ 55% ທີ່ 1550 nm, ແລະ ຄວາມເປັນໄປໄດ້ຫຼັງກຳມະຈອນ 7%. ບົນພື້ນຖານນີ້, ມະຫາວິທະຍາໄລວິທະຍາສາດ ແລະ ເຕັກໂນໂລຊີຂອງຈີນໄດ້ສ້າງລະບົບ liDAR ໂດຍໃຊ້ເສັ້ນໄຍຫຼາຍໂໝດພ້ອມໆກັນຮ່ວມກັບເຄື່ອງກວດຈັບໂຟຕອນດຽວ APD InGaAs ແບບເສລີ. ອຸປະກອນການທົດລອງສະແດງຢູ່ໃນຮູບ (c) ແລະ (d), ແລະ ການກວດຈັບເມກຫຼາຍຊັ້ນທີ່ມີຄວາມສູງ 12 ກິໂລແມັດແມ່ນຮັບຮູ້ດ້ວຍຄວາມລະອຽດເວລາ 1 ວິນາທີ ແລະ ຄວາມລະອຽດທາງພື້ນທີ່ 15 ແມັດ.
ເວລາໂພສ: ພຶດສະພາ-07-2024