




ຕົວດັດແປງແສງຊິລິໂຄນສຳລັບ FMCW
ດັ່ງທີ່ພວກເຮົາທຸກຄົນຮູ້, ໜຶ່ງໃນອົງປະກອບທີ່ສຳຄັນທີ່ສຸດໃນລະບົບ Lidar ທີ່ອີງໃສ່ FMCW ແມ່ນຕົວປັບຄວາມໂຄ້ງຂອງເສັ້ນຊື່ສູງ. ຫຼັກການເຮັດວຽກຂອງມັນແມ່ນສະແດງຢູ່ໃນຮູບຕໍ່ໄປນີ້: ການໃຊ້ຕົວປັບ DP-IQອີງໃສ່ການປັບປ່ຽນແຖບຄວາມຖີ່ຂ້າງດຽວ (SSB), ດ້ານເທິງ ແລະ ດ້ານລຸ່ມMZMເຮັດວຽກຢູ່ຈຸດ null, ຢູ່ແຄມທາງ ແລະ ລົງແຖບຂ້າງຂອງ wc+wm ແລະ WC-WM, wm ແມ່ນຄວາມຖີ່ຂອງການມອດູເລດ, ແຕ່ໃນເວລາດຽວກັນຊ່ອງທາງລຸ່ມຈະນຳສະເໜີຄວາມແຕກຕ່າງຂອງເຟສ 90 ອົງສາ, ແລະ ສຸດທ້າຍແສງຂອງ WC-WM ຈະຖືກຍົກເລີກ, ມີພຽງແຕ່ເທີມການປ່ຽນຄວາມຖີ່ຂອງ wc+wm ເທົ່ານັ້ນ. ໃນຮູບ b, ສີຟ້າ LR ແມ່ນສັນຍານສຽງ FM ທ້ອງຖິ່ນ, ສີສົ້ມ RX ແມ່ນສັນຍານທີ່ສະທ້ອນ, ແລະ ເນື່ອງຈາກຜົນກະທົບຂອງ Doppler, ສັນຍານ beat ສຸດທ້າຍຈະຜະລິດ f1 ແລະ f2.
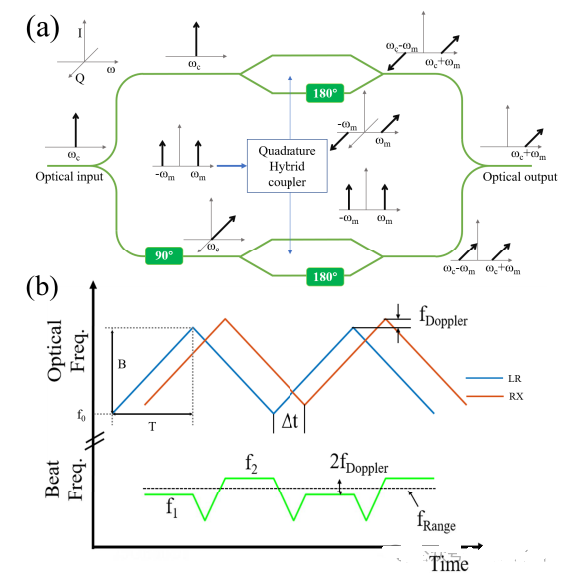
ໄລຍະທາງ ແລະ ຄວາມໄວແມ່ນ:

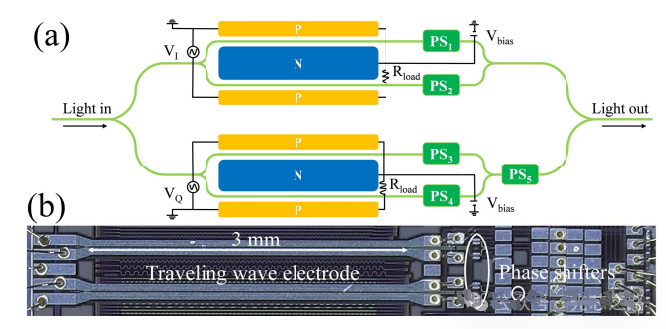
ຕໍ່ໄປນີ້ແມ່ນບົດຄວາມທີ່ຈັດພິມໂດຍມະຫາວິທະຍາໄລຊຽງໄຮ້ ເຈຍຕົງ ໃນປີ 2021, ກ່ຽວກັບSSBເຄື່ອງກຳເນີດໄຟຟ້າທີ່ປະຕິບັດ FMCW ໂດຍອີງໃສ່ຕົວປັບແສງຊິລິໂຄນ.
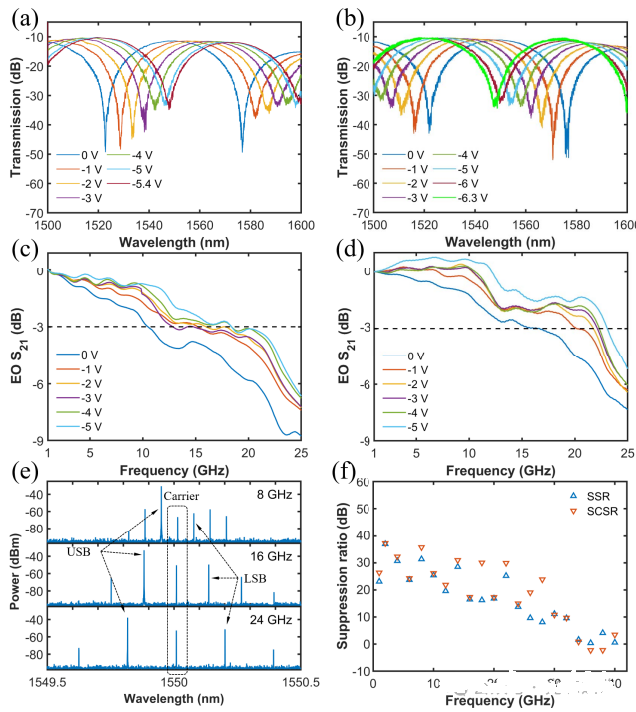
ປະສິດທິພາບຂອງ MZM ແມ່ນສະແດງໃຫ້ເຫັນດັ່ງຕໍ່ໄປນີ້: ຄວາມແຕກຕ່າງຂອງປະສິດທິພາບຂອງຕົວປັບສັນຍານແຂນເທິງ ແລະ ແຂນລຸ່ມແມ່ນຂ້ອນຂ້າງໃຫຍ່. ອັດຕາການປະຕິເສດຂອງແຖບຂ້າງຂອງຕົວຮັບສັນຍານແມ່ນແຕກຕ່າງກັນໄປຕາມອັດຕາການປັບສັນຍານຄວາມຖີ່, ແລະຜົນກະທົບຈະຮ້າຍແຮງຂຶ້ນເມື່ອຄວາມຖີ່ເພີ່ມຂຶ້ນ.
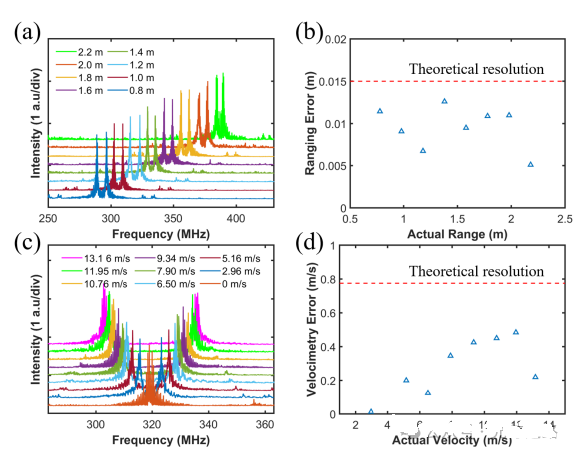
ໃນຮູບຕໍ່ໄປນີ້, ຜົນການທົດສອບຂອງລະບົບ Lidar ສະແດງໃຫ້ເຫັນວ່າ a/b ແມ່ນສັນຍານຈັງຫວະທີ່ຄວາມໄວດຽວກັນ ແລະ ໃນໄລຍະທາງທີ່ແຕກຕ່າງກັນ, ແລະ c/d ແມ່ນສັນຍານຈັງຫວະທີ່ໄລຍະທາງດຽວກັນ ແລະ ໃນຄວາມໄວທີ່ແຕກຕ່າງກັນ. ຜົນການທົດສອບບັນລຸໄດ້ 15 ມມ ແລະ 0.775 ແມັດ/ວິນາທີ.
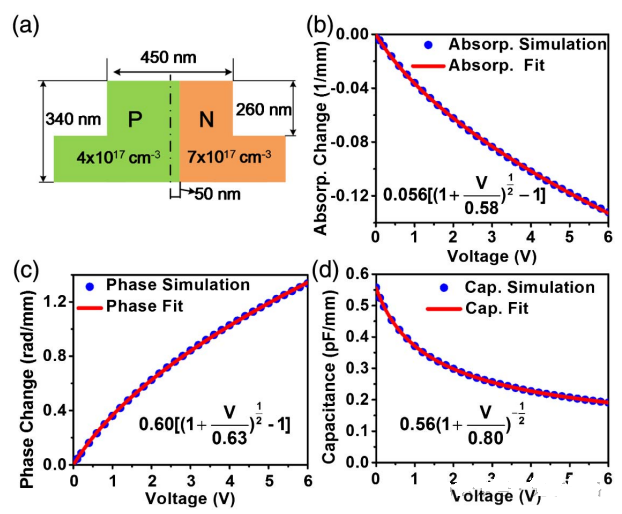
ໃນທີ່ນີ້, ມີພຽງການໃຊ້ຊິລິໂຄນເທົ່ານັ້ນຕົວປັບສັນຍານແສງສຳລັບ FMCW ໄດ້ຖືກປຶກສາຫາລື. ໃນຄວາມເປັນຈິງແລ້ວ, ຜົນກະທົບຂອງຕົວດັດແປງແສງຊິລິໂຄນບໍ່ດີເທົ່າກັບຕົວປັບ LiNO3ສ່ວນໃຫຍ່ແມ່ນຍ້ອນວ່າໃນຕົວດັດແປງແສງຊິລິໂຄນ, ການປ່ຽນແປງເຟສ/ສຳປະສິດການດູດຊຶມ/ຄວາມຈຸຂອງຈຸດເຊື່ອມຕໍ່ແມ່ນບໍ່ເປັນເສັ້ນຊື່ກັບການປ່ຽນແປງຂອງແຮງດັນ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້:
ນັ້ນຄື,
ຄວາມສຳພັນລະຫວ່າງພະລັງງານຜົນຜະລິດຂອງຕົວປັບສຽງລະບົບແມ່ນດັ່ງຕໍ່ໄປນີ້
ຜົນໄດ້ຮັບແມ່ນການຫຼຸດລະດັບຄວາມເຂັ້ມຂຸ້ນສູງ:
ສິ່ງເຫຼົ່ານີ້ຈະເຮັດໃຫ້ສັນຍານຄວາມຖີ່ຂອງຈັງຫວະກວ້າງຂຶ້ນ ແລະ ອັດຕາສ່ວນສັນຍານຕໍ່ສຽງລົບກວນຫຼຸດລົງ. ດັ່ງນັ້ນ, ມີວິທີໃດແດ່ທີ່ຈະປັບປຸງຄວາມເປັນເສັ້ນຊື່ຂອງຕົວດັດແປງແສງຊິລິໂຄນ? ໃນທີ່ນີ້ພວກເຮົາພຽງແຕ່ສົນທະນາກ່ຽວກັບລັກສະນະຂອງອຸປະກອນເທົ່ານັ້ນ, ແລະ ບໍ່ໄດ້ສົນທະນາກ່ຽວກັບໂຄງການຊົດເຊີຍໂດຍໃຊ້ໂຄງສ້າງຊ່ວຍອື່ນໆ.
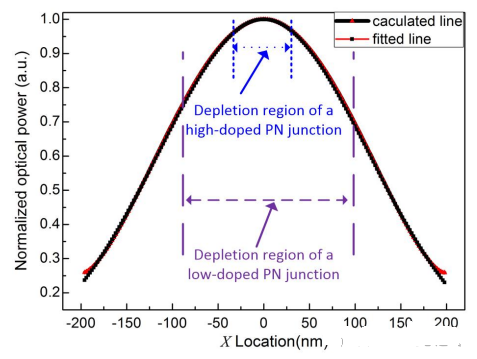
ໜຶ່ງໃນເຫດຜົນຂອງຄວາມບໍ່ເປັນເສັ້ນຊື່ຂອງເຟສມອດູເລດກັບແຮງດັນແມ່ນວ່າພາກສະໜາມແສງສະຫວ່າງໃນຄື້ນນຳທາງແມ່ນຢູ່ໃນການແຈກຢາຍຂອງພາລາມິເຕີໜັກ ແລະ ເບົາທີ່ແຕກຕ່າງກັນ ແລະ ອັດຕາການປ່ຽນແປງເຟສແມ່ນແຕກຕ່າງກັນກັບການປ່ຽນແປງຂອງແຮງດັນ. ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຕໍ່ໄປນີ້. ພາກພື້ນ depletion ທີ່ມີການແຊກແຊງໜັກມີການປ່ຽນແປງໜ້ອຍກວ່າທີ່ມີການແຊກແຊງແສງ.
ຮູບຕໍ່ໄປນີ້ສະແດງໃຫ້ເຫັນເສັ້ນໂຄ້ງການປ່ຽນແປງຂອງການບິດເບືອນລະຫວ່າງໂມດູເລຊັນລຳດັບທີສາມ TID ແລະ ການບິດເບືອນຮາໂມນິກລຳດັບທີສອງ SHD ດ້ວຍຄວາມເຂັ້ມຂຸ້ນຂອງ clutter, ນັ້ນຄືຄວາມຖີ່ຂອງໂມດູເລຊັນ. ສາມາດເຫັນໄດ້ວ່າຄວາມສາມາດໃນການສະກັດກັ້ນຂອງ detuning ສຳລັບ clutter ໜັກແມ່ນສູງກວ່າສຳລັບ clutter ເບົາ. ດັ່ງນັ້ນ, ການ remixing ຊ່ວຍປັບປຸງຄວາມເປັນເສັ້ນຊື່.

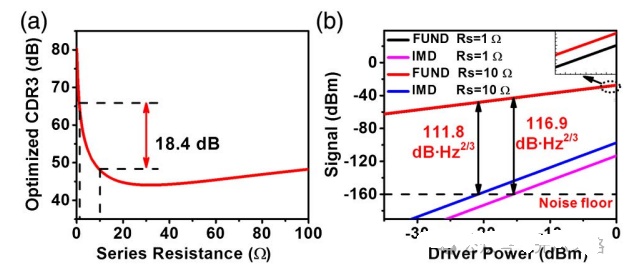
ຂ້າງເທິງນີ້ແມ່ນເທົ່າກັບການພິຈາລະນາ C ໃນຮູບແບບ RC ຂອງ MZM, ແລະອິດທິພົນຂອງ R ຄວນພິຈາລະນາເຊັ່ນກັນ. ຕໍ່ໄປນີ້ແມ່ນເສັ້ນໂຄ້ງການປ່ຽນແປງຂອງ CDR3 ດ້ວຍຄວາມຕ້ານທານຊຸດ. ສາມາດເຫັນໄດ້ວ່າຄວາມຕ້ານທານຊຸດນ້ອຍເທົ່າໃດ, CDR3 ກໍ່ຈະໃຫຍ່ຂຶ້ນເທົ່ານັ້ນ.
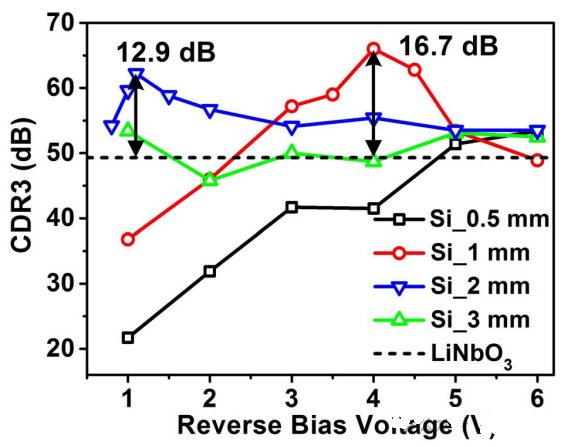
ສຸດທ້າຍແຕ່ບໍ່ໜ້ອຍທີ່ສຸດ, ຜົນກະທົບຂອງຕົວດັດແປງຊິລິໂຄນບໍ່ຈຳເປັນຕ້ອງຮ້າຍແຮງກວ່າ LiNbO3. ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້, CDR3 ຂອງຕົວປັບໂມດູເລຊິລິກອນຈະສູງກວ່າ LiNbO3 ໃນກໍລະນີທີ່ມີອະຄະຕິເຕັມທີ່ໂດຍຜ່ານການອອກແບບທີ່ສົມເຫດສົມຜົນຂອງໂຄງສ້າງ ແລະ ຄວາມຍາວຂອງໂມດູເລດ. ເງື່ອນໄຂການທົດສອບຍັງຄົງສອດຄ່ອງ.
ສະຫຼຸບແລ້ວ, ການອອກແບບໂຄງສ້າງຂອງຕົວດັດແປງແສງຊິລິໂຄນສາມາດຫຼຸດຜ່ອນໄດ້ເທົ່ານັ້ນ, ບໍ່ສາມາດຮັກສາໃຫ້ຫາຍຂາດໄດ້, ແລະວ່າມັນສາມາດຖືກນໍາໃຊ້ໃນລະບົບ FMCW ໄດ້ແທ້ຫຼືບໍ່ນັ້ນຕ້ອງການການຢັ້ງຢືນຈາກການທົດລອງ, ຖ້າມັນສາມາດເຮັດໄດ້ແທ້, ມັນສາມາດບັນລຸການເຊື່ອມໂຍງເຄື່ອງຮັບສົ່ງສັນຍານ, ເຊິ່ງມີຂໍ້ດີໃນການຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍໃນຂະໜາດໃຫຍ່.
ເວລາໂພສ: ວັນທີ 18 ມີນາ 2024