




ການຄວບຄຸມຄວາມຖີ່ຂອງກຳມະຈອນເທັກໂນໂລຢີການຄວບຄຸມກຳມະຈອນເລເຊີ
1. ແນວຄວາມຄິດຂອງຄວາມຖີ່ຂອງກຳມະຈອນ, ອັດຕາການເກີດກຳມະຈອນເລເຊີ (ອັດຕາການເກີດກຳມະຈອນຊ້ຳ) ໝາຍເຖິງຈຳນວນກຳມະຈອນເລເຊີທີ່ປ່ອຍອອກມາຕໍ່ໜ່ວຍເວລາ, ໂດຍປົກກະຕິແລ້ວເປັນເຮີດຊ໌ (Hz). ກຳມະຈອນຄວາມຖີ່ສູງແມ່ນເໝາະສົມສຳລັບການນຳໃຊ້ທີ່ມີອັດຕາການເກີດກຳມະຈອນຊ້ຳສູງ, ໃນຂະນະທີ່ກຳມະຈອນຄວາມຖີ່ຕ່ຳແມ່ນເໝາະສົມສຳລັບວຽກງານກຳມະຈອນດ່ຽວພະລັງງານສູງ.
2. ຄວາມສຳພັນລະຫວ່າງພະລັງງານ, ຄວາມກວ້າງຂອງກຳມະຈອນ ແລະ ຄວາມຖີ່ ກ່ອນການຄວບຄຸມຄວາມຖີ່ເລເຊີ, ຕ້ອງອະທິບາຍຄວາມສຳພັນລະຫວ່າງພະລັງງານ, ຄວາມກວ້າງຂອງກຳມະຈອນ ແລະ ຄວາມຖີ່ກ່ອນ. ມີການພົວພັນທີ່ສັບສົນລະຫວ່າງພະລັງງານເລເຊີ, ຄວາມຖີ່ ແລະ ຄວາມກວ້າງຂອງກຳມະຈອນ, ແລະ ການປັບຕົວໜຶ່ງໃນຕົວກຳນົດໂດຍປົກກະຕິແລ້ວຕ້ອງພິຈາລະນາສອງຕົວກຳນົດອື່ນໆເພື່ອເພີ່ມປະສິດທິພາບຜົນກະທົບຂອງການນຳໃຊ້.
3. ວິທີການຄວບຄຸມຄວາມຖີ່ຂອງກຳມະຈອນທົ່ວໄປ
ກ. ຮູບແບບການຄວບຄຸມພາຍນອກໂຫຼດສັນຍານຄວາມຖີ່ຢູ່ນອກແຫຼ່ງຈ່າຍໄຟ, ແລະປັບຄວາມຖີ່ຂອງກຳມະຈອນເລເຊີໂດຍການຄວບຄຸມຄວາມຖີ່ ແລະ ວົງຈອນໜ້າທີ່ຂອງສັນຍານໂຫຼດ. ສິ່ງນີ້ຊ່ວຍໃຫ້ກຳມະຈອນຜົນຜະລິດສາມາດປະສານກັບສັນຍານໂຫຼດ, ເຮັດໃຫ້ມັນເໝາະສົມສຳລັບການນຳໃຊ້ທີ່ຕ້ອງການການຄວບຄຸມທີ່ຊັດເຈນ.
ຂ. ຮູບແບບການຄວບຄຸມພາຍໃນ ສັນຍານຄວບຄຸມຄວາມຖີ່ຖືກສ້າງຂຶ້ນໃນແຫຼ່ງພະລັງງານຂອງໄດຣຟ໌, ໂດຍບໍ່ມີການປ້ອນສັນຍານພາຍນອກເພີ່ມເຕີມ. ຜູ້ໃຊ້ສາມາດເລືອກລະຫວ່າງຄວາມຖີ່ຄົງທີ່ໃນຕົວ ຫຼື ຄວາມຖີ່ຄວບຄຸມພາຍໃນທີ່ສາມາດປັບໄດ້ເພື່ອຄວາມຍືດຫຍຸ່ນທີ່ດີກວ່າ.
ຄ. ການປັບຄວາມຍາວຂອງຕົວສະທ້ອນສຽງ ຫຼືຕົວປັບສັນຍານໄຟຟ້າ-ແສງຄຸນລັກສະນະຄວາມຖີ່ຂອງເລເຊີສາມາດປ່ຽນແປງໄດ້ໂດຍການປັບຄວາມຍາວຂອງຕົວສະທ້ອນແສງ ຫຼື ການໃຊ້ຕົວດັດແປງໄຟຟ້າແສງ. ວິທີການຄວບຄຸມຄວາມຖີ່ສູງນີ້ມັກຖືກນໍາໃຊ້ໃນຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການພະລັງງານສະເລ່ຍທີ່ສູງກວ່າ ແລະ ຄວາມກວ້າງຂອງກໍາມະຈອນທີ່ສັ້ນກວ່າ, ເຊັ່ນ: ການຜະລິດດ້ວຍເລເຊີໄມໂຄຣມາຄິນ ແລະ ການຖ່າຍພາບທາງການແພດ.
d. ຕົວປັບແສງ Acousto(AOM Modulator) ເປັນເຄື່ອງມືທີ່ສຳຄັນສຳລັບການຄວບຄຸມຄວາມຖີ່ກຳມະຈອນຂອງເທັກໂນໂລຢີການຄວບຄຸມກຳມະຈອນເລເຊີ.ຕົວດັດແປງ AOMໃຊ້ຜົນກະທົບຂອງແສງອາຄູສໂຕ (ນັ້ນຄື, ຄວາມດັນການສັ່ນສະເທືອນກົນຈັກຂອງຄື້ນສຽງປ່ຽນແປງດັດຊະນີການຫັກເຫ) ເພື່ອປັບ ແລະ ຄວບຄຸມລຳແສງເລເຊີ.
4. ເຕັກໂນໂລຊີການປັບລະດັບພາຍໃນຊ່ອງ, ເມື່ອປຽບທຽບກັບການປັບລະດັບພາຍນອກ, ການປັບລະດັບພາຍໃນຊ່ອງສາມາດສ້າງພະລັງງານສູງ ແລະ ພະລັງງານສູງສຸດໄດ້ຢ່າງມີປະສິດທິພາບຫຼາຍຂຶ້ນເລເຊີຊີບພັລສ໌ຕໍ່ໄປນີ້ແມ່ນເຕັກນິກການປັບປ່ຽນພາຍໃນຊ່ອງທ້ອງສີ່ຢ່າງທົ່ວໄປ:
ກ. ການສະຫຼັບກຳໄລໂດຍການປັບປ່ຽນແຫຼ່ງກຳໄລຢ່າງໄວວາ, ການປີ້ນກັບຂອງຈຳນວນອະນຸພາກກາງກຳໄລ ແລະ ສຳປະສິດກຳໄລຈະຖືກສ້າງຕັ້ງຂຶ້ນຢ່າງໄວວາ, ເກີນອັດຕາການແຜ່ລັງສີທີ່ຖືກກະຕຸ້ນ, ເຊິ່ງເຮັດໃຫ້ໂຟຕອນໃນຊ່ອງແສງເພີ່ມຂຶ້ນຢ່າງຫຼວງຫຼາຍ ແລະ ການສ້າງເລເຊີກຳມະຈອນສັ້ນ. ວິທີການນີ້ແມ່ນພົບເລເຊີເຄິ່ງຕົວນຳ, ເຊິ່ງສາມາດຜະລິດກຳມະຈອນຕັ້ງແຕ່ນາໂນວິນາທີຈົນເຖິງຫຼາຍສິບພິໂກວິນາທີ, ດ້ວຍອັດຕາການຊ້ຳກັນຫຼາຍກິກະເຮີດ, ແລະ ຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນຂົງເຂດການສື່ສານທາງແສງທີ່ມີອັດຕາການສົ່ງຂໍ້ມູນສູງ.
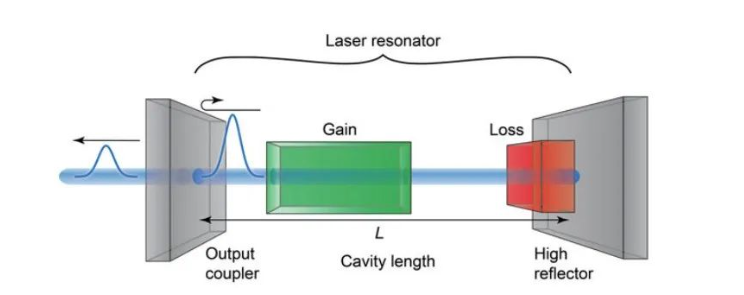
ສະວິດ Q (Q-switching) ສະວິດ Q ສະກັດກັ້ນການຕອບສະໜອງທາງແສງໂດຍການນຳເອົາການສູນເສຍສູງເຂົ້າໄປໃນຊ່ອງແສງເລເຊີ, ຊ່ວຍໃຫ້ຂະບວນການສູບນ້ຳສາມາດຜະລິດການປ່ຽນແປງປະຊາກອນອະນຸພາກເກີນຂອບເຂດ, ເກັບຮັກສາພະລັງງານຈຳນວນຫຼວງຫຼາຍ. ຫຼັງຈາກນັ້ນ, ການສູນເສຍໃນຊ່ອງແສງຈະຫຼຸດລົງຢ່າງໄວວາ (ນັ້ນຄື, ຄ່າ Q ຂອງຊ່ອງແສງຈະເພີ່ມຂຶ້ນ), ແລະ ການຕອບສະໜອງທາງແສງຈະຖືກເປີດອີກຄັ້ງ, ດັ່ງນັ້ນພະລັງງານທີ່ເກັບໄວ້ຈະຖືກປ່ອຍອອກມາໃນຮູບແບບຂອງກຳມະຈອນຄວາມເຂັ້ມສູງທີ່ສັ້ນຫຼາຍ.
ຄ. ການລັອກໂໝດສ້າງກຳມະຈອນໄລຍະສັ້ນຫຼາຍຂອງລະດັບ picosecond ຫຼືແມ່ນແຕ່ femtosecond ໂດຍການຄວບຄຸມຄວາມສຳພັນຂອງໄລຍະລະຫວ່າງໂໝດຕາມລວງຍາວທີ່ແຕກຕ່າງກັນໃນຊ່ອງເລເຊີ. ເທັກໂນໂລຢີການລັອກໂໝດແບ່ງອອກເປັນການລັອກໂໝດແບບ passive ແລະ ການລັອກໂໝດ active.
ງ. ການຖິ້ມພະລັງງານໃນຊ່ອງ ໂດຍການເກັບຮັກສາພະລັງງານໄວ້ໃນໂຟຕອນໃນຕົວສະທ້ອນແສງ, ໂດຍໃຊ້ກະຈົກຊ່ອງທີ່ມີການສູນເສຍຕ່ຳເພື່ອຜູກມັດໂຟຕອນຢ່າງມີປະສິດທິພາບ, ຮັກສາສະຖານະການສູນເສຍຕ່ຳໃນຊ່ອງເປັນໄລຍະເວລາໜຶ່ງ. ຫຼັງຈາກຮອບວຽນການເດີນທາງຮອບໜຶ່ງ, ກຳມະຈອນທີ່ແຂງແຮງຈະຖືກ "ຖິ້ມ" ອອກຈາກຊ່ອງໂດຍການສະຫຼັບອົງປະກອບຊ່ອງພາຍໃນຢ່າງໄວວາ, ເຊັ່ນ: ຕົວດັດແປງສຽງ ຫຼື ຊັດເຕີໄຟຟ້າແສງ, ແລະເລເຊີກຳມະຈອນສັ້ນຈະຖືກປ່ອຍອອກມາ. ເມື່ອປຽບທຽບກັບ Q-switching, ການເປົ່າຫວ່າງຊ່ອງສາມາດຮັກສາຄວາມກວ້າງຂອງກຳມະຈອນຫຼາຍນາໂນວິນາທີໃນອັດຕາການຊ້ຳຊ້ອນສູງ (ເຊັ່ນ: ຫຼາຍເມກາເຮີດ) ແລະອະນຸຍາດໃຫ້ມີພະລັງງານກຳມະຈອນສູງຂຶ້ນ, ໂດຍສະເພາະສຳລັບການນຳໃຊ້ທີ່ຕ້ອງການອັດຕາການຊ້ຳຊ້ອນສູງ ແລະ ກຳມະຈອນສັ້ນ. ລວມກັບເຕັກນິກການສ້າງກຳມະຈອນອື່ນໆ, ພະລັງງານກຳມະຈອນສາມາດໄດ້ຮັບການປັບປຸງຕື່ມອີກ.
ການຄວບຄຸມກຳມະຈອນຂອງເລເຊີເປັນຂະບວນການທີ່ສັບສົນ ແລະ ສຳຄັນ, ເຊິ່ງກ່ຽວຂ້ອງກັບການຄວບຄຸມຄວາມກວ້າງຂອງກຳມະຈອນ, ການຄວບຄຸມຄວາມຖີ່ຂອງກຳມະຈອນ ແລະ ເຕັກນິກການມອດູເລດຫຼາຍຢ່າງ. ຜ່ານການເລືອກ ແລະ ການນຳໃຊ້ວິທີການເຫຼົ່ານີ້ຢ່າງສົມເຫດສົມຜົນ, ປະສິດທິພາບຂອງເລເຊີສາມາດປັບໄດ້ຢ່າງຖືກຕ້ອງເພື່ອຕອບສະໜອງຄວາມຕ້ອງການຂອງສະຖານະການການນຳໃຊ້ທີ່ແຕກຕ່າງກັນ. ໃນອະນາຄົດ, ດ້ວຍການເກີດຂຶ້ນຢ່າງຕໍ່ເນື່ອງຂອງວັດສະດຸ ແລະ ເຕັກໂນໂລຊີໃໝ່, ເຕັກໂນໂລຊີການຄວບຄຸມກຳມະຈອນຂອງເລເຊີຈະນຳໄປສູ່ຄວາມກ້າວໜ້າຫຼາຍຂຶ້ນ, ແລະ ສົ່ງເສີມການພັດທະນາຂອງເທັກໂນໂລຢີເລເຊີໃນທິດທາງຂອງຄວາມແມ່ນຍໍາທີ່ສູງຂຶ້ນ ແລະ ການນໍາໃຊ້ທີ່ກວ້າງຂວາງກວ່າເກົ່າ.
ເວລາໂພສ: ມີນາ-25-2025