




ແນະນຳໂມດູເລດ Mach-Zehnder ຊິລິໂຄນໂຟໂຕນິກຕົວໂມດູເລດ MZM
ຕົວປ່ຽນ Mach-Zehnder ແມ່ນອົງປະກອບທີ່ສຳຄັນທີ່ສຸດຢູ່ປາຍເຄື່ອງສົ່ງສັນຍານໃນໂມດູນຊິລິໂຄນໂຟໂຕນິກ 400G/800G. ປະຈຸບັນ, ມີຕົວປ່ຽນສອງປະເພດຢູ່ປາຍເຄື່ອງສົ່ງສັນຍານຂອງໂມດູນຊິລິໂຄນໂຟໂຕນິກທີ່ຜະລິດເປັນຈຳນວນຫຼາຍ: ປະເພດໜຶ່ງແມ່ນຕົວປ່ຽນ PAM4 ໂດຍອີງໃສ່ຮູບແບບການເຮັດວຽກ 100Gbps ຊ່ອງທາງດຽວ, ເຊິ່ງບັນລຸການສົ່ງຂໍ້ມູນ 800Gbps ຜ່ານວິທີການຂະໜານ 4 ຊ່ອງທາງ / 8 ຊ່ອງທາງ ແລະ ສ່ວນໃຫຍ່ແມ່ນນຳໃຊ້ໃນສູນຂໍ້ມູນ ແລະ GPU. ແນ່ນອນ, ຕົວປ່ຽນ Mach-Zender ຊິລິໂຄນໂຟໂຕນິກ 200Gbps ຊ່ອງທາງດຽວທີ່ຈະແຂ່ງຂັນກັບ EML ຫຼັງຈາກການຜະລິດເປັນຈຳນວນຫຼາຍທີ່ 100Gbps ບໍ່ຄວນຢູ່ໄກ. ປະເພດທີສອງແມ່ນຕົວປັບ IQນຳໃຊ້ໃນການສື່ສານທາງແສງທີ່ສອດຄ່ອງກັນໃນໄລຍະທາງໄກ. ການຈົມລົງທີ່ສອດຄ່ອງກັນທີ່ກ່າວມາໃນຂັ້ນຕອນປະຈຸບັນໝາຍເຖິງໄລຍະການສົ່ງຂອງໂມດູນແສງທີ່ມີໄລຍະທາງຕັ້ງແຕ່ຫຼາຍພັນກິໂລແມັດໃນເຄືອຂ່າຍກະດູກສັນຫຼັງຂອງນະຄອນຫຼວງຈົນເຖິງໂມດູນແສງ ZR ທີ່ມີໄລຍະທາງຕັ້ງແຕ່ 80 ຫາ 120 ກິໂລແມັດ, ແລະແມ່ນແຕ່ໂມດູນແສງ LR ທີ່ມີໄລຍະທາງຕັ້ງແຕ່ 10 ກິໂລແມັດໃນອະນາຄົດ.
ຫຼັກການຂອງຄວາມໄວສູງຕົວປັບຄວາມດັນຊິລິໂຄນສາມາດແບ່ງອອກເປັນສອງພາກສ່ວນຄື: optics ແລະ electricity.
ຊິ້ນສ່ວນທາງແສງ: ຫຼັກການພື້ນຖານແມ່ນເຄື່ອງວັດແທກຄວາມຖີ່ Mach-Zehnder. ລຳແສງຜ່ານຕົວແຍກລຳແສງ 50-50 ແລະກາຍເປັນລຳແສງສອງລຳທີ່ມີພະລັງງານເທົ່າກັນ, ເຊິ່ງສືບຕໍ່ສົ່ງຕໍ່ໃນສອງແຂນຂອງຕົວປັບຄວາມຖີ່. ໂດຍການຄວບຄຸມໄລຍະໃນໜຶ່ງຂອງແຂນ (ນັ້ນຄື, ດັດຊະນີການຫັກເຫຂອງຊິລິໂຄນຖືກປ່ຽນແປງໂດຍເຄື່ອງເຮັດຄວາມຮ້ອນເພື່ອປ່ຽນຄວາມໄວໃນການແຜ່ກະຈາຍຂອງແຂນໜຶ່ງ), ການລວມລຳແສງສຸດທ້າຍແມ່ນດຳເນີນຢູ່ທີ່ທາງອອກຂອງທັງສອງແຂນ. ຄວາມຍາວຂອງໄລຍະການແຊກແຊງ (ບ່ອນທີ່ຈຸດສູງສຸດຂອງທັງສອງແຂນບັນລຸພ້ອມໆກັນ) ແລະ ການຍົກເລີກການແຊກແຊງ (ບ່ອນທີ່ຄວາມແຕກຕ່າງຂອງໄລຍະແມ່ນ 90° ແລະຈຸດສູງສຸດຢູ່ກົງກັນຂ້າມກັບຮ່ອງ) ສາມາດບັນລຸໄດ້ຜ່ານການແຊກແຊງ, ດັ່ງນັ້ນຈຶ່ງປັບຄວາມເຂັ້ມຂອງແສງ (ເຊິ່ງສາມາດເຂົ້າໃຈໄດ້ວ່າເປັນ 1 ແລະ 0 ໃນສັນຍານດິຈິຕອນ). ນີ້ແມ່ນຄວາມເຂົ້າໃຈງ່າຍໆ ແລະ ຍັງເປັນວິທີການຄວບຄຸມສຳລັບຈຸດເຮັດວຽກໃນວຽກງານຕົວຈິງ. ຕົວຢ່າງ, ໃນການສື່ສານຂໍ້ມູນ, ພວກເຮົາເຮັດວຽກຢູ່ຈຸດທີ່ຕ່ຳກວ່າຈຸດສູງສຸດ 3dB, ແລະ ໃນການສື່ສານທີ່ສອດຄ່ອງກັນ, ພວກເຮົາເຮັດວຽກຢູ່ທີ່ບໍ່ມີຈຸດແສງສະຫວ່າງ. ເຖິງຢ່າງໃດກໍ່ຕາມ, ວິທີການຄວບຄຸມຄວາມແຕກຕ່າງຂອງເຟສຜ່ານການໃຫ້ຄວາມຮ້ອນ ແລະ ການລະບາຍຄວາມຮ້ອນເພື່ອຄວບຄຸມສັນຍານຜົນຜະລິດໃຊ້ເວລາດົນຫຼາຍ ແລະ ບໍ່ສາມາດຕອບສະໜອງຄວາມຕ້ອງການຂອງພວກເຮົາໃນການສົ່ງຂໍ້ມູນ 100Gpbs ຕໍ່ວິນາທີ. ດັ່ງນັ້ນ, ພວກເຮົາຕ້ອງຊອກຫາວິທີທີ່ຈະບັນລຸອັດຕາການມອດູເລດທີ່ໄວຂຶ້ນ.
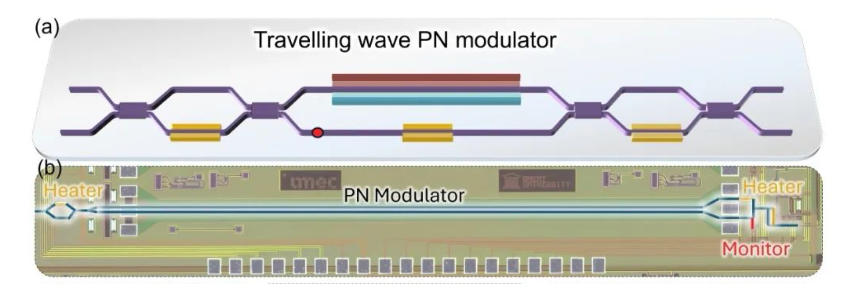
ພາກສ່ວນໄຟຟ້າສ່ວນໃຫຍ່ປະກອບດ້ວຍພາກສ່ວນ PN junction ທີ່ຕ້ອງການປ່ຽນດັດຊະນີການຫັກເຫທີ່ຄວາມຖີ່ສູງ, ແລະໂຄງສ້າງເອເລັກໂຕຣດຄື້ນເຄື່ອນທີ່ທີ່ກົງກັບຄວາມໄວຂອງສັນຍານໄຟຟ້າ ແລະ ສັນຍານທາງແສງ. ຫຼັກການຂອງການປ່ຽນແປງດັດຊະນີການຫັກເຫແມ່ນຜົນກະທົບຂອງການກະຈາຍຂອງ plasma, ເຊິ່ງເອີ້ນກັນວ່າຜົນກະທົບຂອງການກະຈາຍຂອງຕົວນຳເສລີ. ມັນໝາຍເຖິງຜົນກະທົບທາງກາຍະພາບທີ່ເມື່ອຄວາມເຂັ້ມຂຸ້ນຂອງຕົວນຳເສລີໃນວັດສະດຸ semiconductor ປ່ຽນແປງ, ສ່ວນທີ່ແທ້ຈິງ ແລະ ສ່ວນຈິນຕະນາການຂອງດັດຊະນີການຫັກເຫຂອງວັດສະດຸເອງກໍ່ປ່ຽນແປງຕາມຄວາມເໝາະສົມ. ເມື່ອຄວາມເຂັ້ມຂຸ້ນຂອງຕົວນຳໃນວັດສະດຸ semiconductor ເພີ່ມຂຶ້ນ, ສຳປະສິດການດູດຊຶມຂອງວັດສະດຸເພີ່ມຂຶ້ນໃນຂະນະທີ່ສ່ວນທີ່ແທ້ຈິງຂອງດັດຊະນີການຫັກເຫຫຼຸດລົງ. ໃນທຳນອງດຽວກັນ, ເມື່ອຕົວນຳໃນວັດສະດຸ semiconductor ຫຼຸດລົງ, ສຳປະສິດການດູດຊຶມຫຼຸດລົງໃນຂະນະທີ່ສ່ວນທີ່ແທ້ຈິງຂອງດັດຊະນີການຫັກເຫເພີ່ມຂຶ້ນ. ດ້ວຍຜົນກະທົບດັ່ງກ່າວ, ໃນການນຳໃຊ້ຕົວຈິງ, ການປັບປ່ຽນສັນຍານຄວາມຖີ່ສູງສາມາດບັນລຸໄດ້ໂດຍການຄວບຄຸມຈຳນວນຕົວນຳໃນຄື້ນນຳສົ່ງ. ໃນທີ່ສຸດ, ສັນຍານ 0 ແລະ 1 ຈະປາກົດຢູ່ຕຳແໜ່ງຜົນຜະລິດ, ໂຫຼດສັນຍານໄຟຟ້າຄວາມໄວສູງໃສ່ຄວາມກວ້າງຂອງຄວາມເຂັ້ມຂອງແສງ. ວິທີການບັນລຸເປົ້າໝາຍນີ້ແມ່ນຜ່ານຈຸດເຊື່ອມຕໍ່ PN. ຕົວນຳທີ່ເປັນອິດສະຫຼະຂອງຊິລິກອນບໍລິສຸດມີໜ້ອຍຫຼາຍ, ແລະການປ່ຽນແປງຂອງປະລິມານບໍ່ພຽງພໍທີ່ຈະຕອບສະໜອງການປ່ຽນແປງຂອງດັດຊະນີການຫັກເຫ. ດັ່ງນັ້ນ, ມັນຈຳເປັນຕ້ອງເພີ່ມຖານຕົວນຳໃນຄື້ນນຳສົ່ງໂດຍການເສີມຊິລິກອນເພື່ອໃຫ້ບັນລຸການປ່ຽນແປງຂອງດັດຊະນີການຫັກເຫ, ດັ່ງນັ້ນຈຶ່ງບັນລຸການປັບປ່ຽນອັດຕາທີ່ສູງຂຶ້ນ.
ເວລາໂພສ: ພຶດສະພາ-12-2025