




ຕົວຄວບຄຸມຄວາມລຳອຽງແບບອັດຕະໂນມັດ DP-IQ Modulator ທີ່ກະທັດຮັດທີ່ສຸດ


ຄຸນສົມບັດ
•ພ້ອມໆກັນສະໜອງແຮງດັນໄຟຟ້າອະຄະຕິອັດຕະໂນມັດຫົກແຮງດັນສຳລັບໂມດູເລດ IQ ແບບ Dual Polarization
•ຮູບແບບການມອດູເລດທີ່ບໍ່ຂຶ້ນກັບໃຜ:
ໄດ້ຮັບການຢັ້ງຢືນແລ້ວ SSB, QPSK, QAM, OFDM.
•ສຽບແລະຫຼິ້ນ:
ບໍ່ຕ້ອງມີການປັບທຽບດ້ວຍຕົນເອງ ທຸກຢ່າງເປັນອັດຕະໂນມັດ
•ແຂນ I, Q: ຄວບຄຸມໂໝດສູງສຸດ ແລະ ໂໝດສູນ ອັດຕາການສູນພັນສູງ: ສູງສຸດ 50dB1
•ແຂນ P: ຄວບຄຸມໂໝດ Q+ ແລະ Q-. ຄວາມແມ່ນຍຳ: ± 2◦
•ໂປຣໄຟລ໌ຕ່ຳ: 40 ມມ (ກວ້າງ) × 29 ມມ (ເລິກ) × 8 ມມ (ສູງ)
•ຄວາມໝັ້ນຄົງສູງ: ການນຳໃຊ້ດິຈິຕອນຢ່າງຄົບຖ້ວນ ງ່າຍຕໍ່ການໃຊ້:
• ໃຊ້ງານດ້ວຍມືດ້ວຍ mini jumper 2
ການດຳເນີນງານ OEM ທີ່ມີຄວາມຍືດຫຍຸ່ນຜ່ານ UART /IO
•ສອງໂໝດເພື່ອສະໜອງແຮງດັນໄບອັດ: ກ. ການຄວບຄຸມໄບອັດຕະໂນມັດ ຂ. ແຮງດັນໄບອັດທີ່ຜູ້ໃຊ້ກຳນົດ

ແອັບພລິເຄຊັນ
•LiNbO3 ແລະຕົວປັບ DP-IQ ອື່ນໆ
•ການສົ່ງຕໍ່ທີ່ສອດຄ່ອງກັນ
1ອັດຕາສ່ວນການສູນເສຍສູງສຸດແມ່ນຂຶ້ນກັບ ແລະ ບໍ່ສາມາດເກີນ 1 ອັດຕາສ່ວນການສູນເສຍສູງສຸດຂອງຕົວດັດແປງລະບົບ.
2ການດຳເນີນງານ UART ແມ່ນມີໃຫ້ໃຊ້ໃນຕົວຄວບຄຸມບາງລຸ້ນເທົ່ານັ້ນ.
ປະສິດທິພາບ
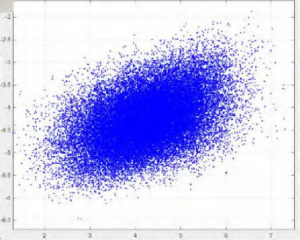
ຮູບທີ 1. ກຸ່ມດາວ (ບໍ່ມີຕົວຄວບຄຸມ)
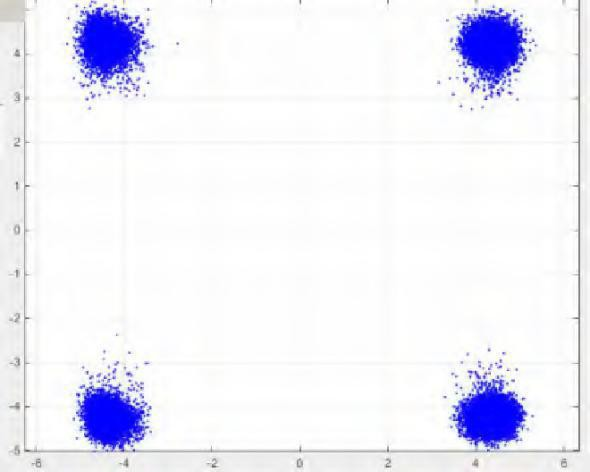
ຮູບທີ 2. ກຸ່ມດາວ QPSK (ພ້ອມຕົວຄວບຄຸມ)
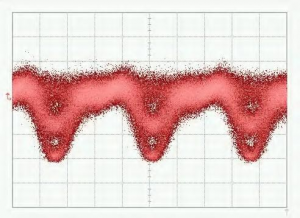
ຮູບທີ 3. ຮູບແບບ QPSK-Eye
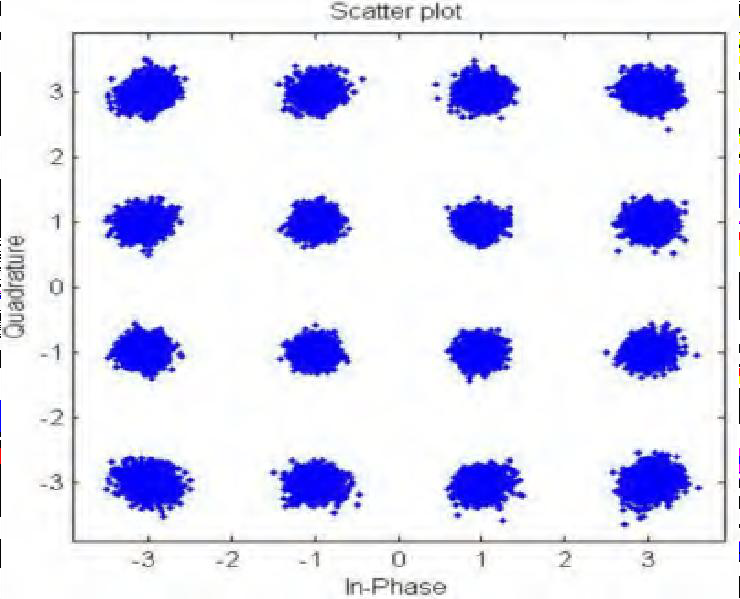
ຮູບທີ 5. ຮູບແບບກຸ່ມດາວ 16-QAM
ຮູບທີ 4. ສະເປກຕຣຳ QPSK

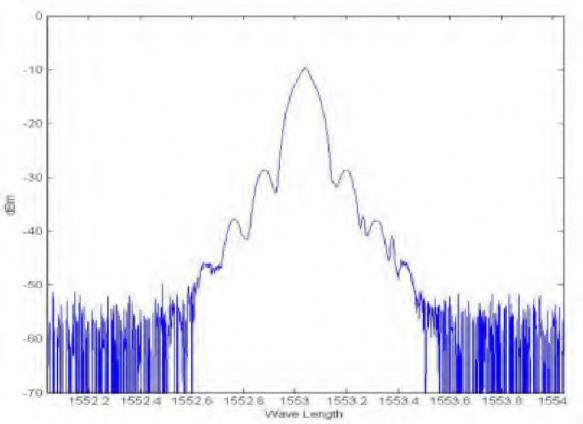
ຮູບທີ 6. ສະເປກຕຣຳ CS-SSB
ລາຍລະອຽດສະເພາະ
| ພາລາມິເຕີ | ນາທີ | ປະເພດ | ສູງສຸດ | ໜ່ວຍ |
| ປະສິດທິພາບການຄວບຄຸມ | ||||
| ແຂນ I, Q ຖືກຄວບຄຸມຢູ່ບໍ່ມີຄ່າ (ຕໍ່າສຸດ)or ຈຸດສູງສຸດ (ສູງສຸດ)ຈຸດ | ||||
| ອັດຕາສ່ວນການສູນພັນ | MER1 | 50 | dB | |
| ແຂນ P ຖືກຄວບຄຸມໃນQ+(ມຸມສາກຂວາ)or Q-( ຮູບສີ່ຫຼ່ຽມມຸມຊ້າຍ)ຈຸດ | ||||
| ຄວາມຖືກຕ້ອງຢູ່ທີ່ Quad | −2 | +2 | ປະລິນຍາ2 | |
| ເວລາສະຖຽນລະພາບ | 45 | 50 | 55 | s |
| ໄຟຟ້າ | ||||
| ແຮງດັນໄຟຟ້າບວກ | +14.5 | +15 | +15.5 | V |
| ກະແສໄຟຟ້າບວກ | 20 | 30 | mA | |
| ແຮງດັນໄຟຟ້າລົບ | -15.5 | -15 | -14.5 | V |
| ກະແສໄຟຟ້າລົບ | 8 | 15 | mA | |
| ລະດັບແຮງດັນຜົນຜະລິດຂອງ YI/YQ/XI/XQ | -14.5 | +14.5 | V | |
| ລະດັບແຮງດັນຜົນຜະລິດຂອງ YP/XP | -13 | +13 | V | |
| ຄວາມກວ້າງຂອງ Dither | 1%Vπ | V | ||
| ອອບຕິກ | ||||
| ພະລັງງານແສງປ້ອນຂໍ້ມູນ3 | -30 | -8 | dBm | |
| ຄວາມຍາວຄື້ນປ້ອນຂໍ້ມູນ | 1100 | 1650 | nm | |
1 MER ໝາຍເຖິງອັດຕາສ່ວນການສູນເສຍຂອງໂມດູເລເຕີພາຍໃນ. ອັດຕາສ່ວນການສູນເສຍທີ່ບັນລຸໄດ້ໂດຍທົ່ວໄປແມ່ນອັດຕາສ່ວນການສູນເສຍຂອງໂມດູເລເຕີທີ່ລະບຸໄວ້ໃນແຜ່ນຂໍ້ມູນຂອງໂມດູເລເຕີ.
2ໃຫ້Vπ ໝາຍເຖິງແຮງດັນໄບອັດທີ່ 180◦ ແລະVP ໝາຍເຖິງແຮງດັນໄບອັດທີ່ດີທີ່ສຸດຢູ່ຈຸດ Quad.
3ກະລຸນາຮັບຊາບວ່າພະລັງງານແສງເຂົ້າບໍ່ໄດ້ໝາຍເຖິງພະລັງງານແສງຢູ່ຈຸດໄບອັດທີ່ເລືອກ. ມັນແມ່ນພະລັງງານແສງສູງສຸດທີ່ໂມດູເລເຕີສາມາດສົ່ງອອກໄປຫາຕົວຄວບຄຸມໄດ້ເມື່ອແຮງດັນໄບອັດຢູ່ໃນລະຫວ່າງ−Vπ ໄປຫາ +Vπ .
ອິນເຕີເຟດຜູ້ໃຊ້
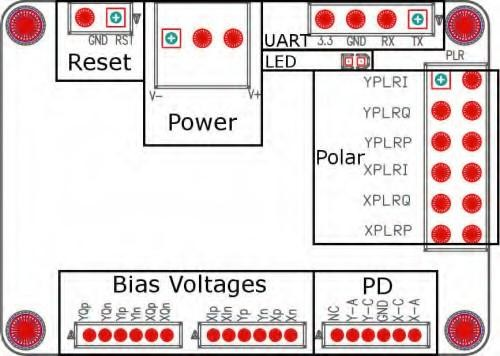
ຮູບທີ 5. ການປະກອບ
| ກຸ່ມ | ການດຳເນີນງານ | ຄຳອະທິບາຍ |
| ພັກຜ່ອນ | ໃສ່ສາຍຈູມ ແລະ ດຶງອອກຫຼັງຈາກ 1 ວິນາທີ | ຣີເຊັດຕົວຄວບຄຸມ |
| ພະລັງງານ | ແຫຼ່ງພະລັງງານສຳລັບຕົວຄວບຄຸມຄວາມລຳອຽງ | V- ເຊື່ອມຕໍ່ເອເລັກໂຕຣດລົບຂອງແຫຼ່ງຈ່າຍໄຟ |
| V+ ເຊື່ອມຕໍ່ຂົ້ວບວກຂອງແຫຼ່ງຈ່າຍໄຟ | ||
| ພອດກາງເຊື່ອມຕໍ່ກັບເອເລັກໂຕຣດດິນ | ||
| UART | ໃຊ້ຕົວຄວບຄຸມຜ່ານ UART | 3.3: ແຮງດັນອ້າງອີງ 3.3V |
| GND: ພື້ນດິນ | ||
| RX: ຮັບຂອງຕົວຄວບຄຸມ | ||
| TX: ສົ່ງຕໍ່ຂອງຕົວຄວບຄຸມ | ||
| LED | ເປີດຢູ່ຕະຫຼອດເວລາ | ເຮັດວຽກພາຍໃຕ້ສະພາບທີ່ໝັ້ນຄົງ |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 0.2 ວິນາທີ | ການປະມວນຜົນຂໍ້ມູນ ແລະ ການຄົ້ນຫາຈຸດຄວບຄຸມ | |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 1 ວິນາທີ | ພະລັງງານແສງປ້ອນຂໍ້ມູນອ່ອນແອເກີນໄປ | |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 3 ວິນາທີ | ພະລັງງານແສງອິນພຸດແຮງເກີນໄປ | |
| ຂົ້ວໂລກ1 | XPLRI: ໃສ່ ຫຼື ດຶງ jumper ອອກມາ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Null; ມີຕົວເຊື່ອມຕໍ່: ໂໝດສູງສຸດ |
| XPLRQ: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Null; ມີຕົວເຊື່ອມຕໍ່: ໂໝດສູງສຸດ | |
| XPLRP: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Q+; ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Q- | |
| YPLRI: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Null; ມີຕົວເຊື່ອມຕໍ່: ໂໝດສູງສຸດ | |
| YPLRQ: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Null; ມີຕົວເຊື່ອມຕໍ່: ໂໝດສູງສຸດ | |
| YPLRP: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Q+; ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Q- | |
| ແຮງດັນໄຟຟ້າອະຄະຕິ | YQp, YQn: ອະຄະຕິສຳລັບແຂນ Q ໂພລາໄຣເຊຊັນ Y | YQp: ດ້ານບວກ; YQn: ດ້ານລົບ ຫຼື ພື້ນດິນ |
| YIp, YIn: ອະຄະຕິສຳລັບແຂນ I ໂພລາໄຣເຊຊັນ Y | YIp: ດ້ານບວກ; YIn: ດ້ານລົບ ຫຼື ພື້ນດິນ | |
| XQp, XQn: ອະຄະຕິສຳລັບແຂນ Q ໂພລາໄຣເຊຊັນ X | XQp: ດ້ານບວກ; XQn: ດ້ານລົບ ຫຼື ພື້ນດິນ | |
| XIp, XIn: ອະຄະຕິສຳລັບແຂນ I ໂພລາໄຣເຊຊັນ X | XIp: ດ້ານບວກ; XIn: ດ້ານລົບ ຫຼື ພື້ນດິນ | |
| YPp, YPn: ອະຄະຕິສຳລັບແຂນ P ໂພລາໄຣເຊຊັນ Y | YPp: ດ້ານບວກ; YPn: ດ້ານລົບ ຫຼື ພື້ນດິນ | |
| XPp, XPn: ອະຄະຕິສຳລັບແຂນ P ໂພລາໄຣເຊຊັນ X | XPp: ດ້ານບວກ; XPn: ດ້ານລົບ ຫຼື ພື້ນດິນ |
1 ຂົ້ວໂລກຂຶ້ນກັບສັນຍານ RF ຂອງລະບົບ. ເມື່ອບໍ່ມີສັນຍານ RF ຢູ່ໃນລະບົບ, ຂົ້ວໂລກຄວນຈະເປັນບວກ. ເມື່ອສັນຍານ RF ມີແອມພລິຈູດຫຼາຍກວ່າລະດັບໃດໜຶ່ງ, ຂົ້ວໂລກຈະປ່ຽນຈາກບວກໄປເປັນລົບ. ໃນເວລານີ້, ຈຸດ Null ແລະຈຸດສູງສຸດຈະສະຫຼັບກັນ. ຈຸດ Q+ ແລະຈຸດ Q- ຈະສະຫຼັບກັນເຊັ່ນກັນ. ສະຫຼັບຂົ້ວໂລກຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດປ່ຽນ
ຂົ້ວໂດຍກົງໂດຍບໍ່ຕ້ອງປ່ຽນຈຸດປະຕິບັດງານ.
| ກຸ່ມ | ການດຳເນີນງານ | ຄຳອະທິບາຍ |
| PD1 | NC: ບໍ່ໄດ້ເຊື່ອມຕໍ່ | |
| YA: ໂຟໂຕໄດໂອດ Y-ໂພລາໄຣເຊຊັນ ອາໂນດ | YA ແລະ YC: ການຕອບສະໜອງກະແສໄຟຟ້າໂພລາໄຣເຊຊັນ Y | |
| YC: ໂຟໂຕໄດໂອດ Y-ໂພລາໄຣເຊຊັນ ແຄໂທດ | ||
| GND: ພື້ນດິນ | ||
| XC: ໂຟໂຕໄດໂອດ X-ໂພລາໄຣເຊຊັນ ແຄໂທດ | XA ແລະ XC: ການຕອບສະໜອງກະແສໄຟຟ້າໂພລາໄຣເຊຊັນ X | |
| XA: ໂຟໂຕໄດໂອດ X-ໂພລາໄຣເຊຊັນ ອາໂນດ |
1 ຄວນເລືອກພຽງທາງເລືອກດຽວເທົ່ານັ້ນລະຫວ່າງການໃຊ້ໂຟໂຕໄດໂອດຄວບຄຸມ ຫຼື ການໃຊ້ໂຟໂຕໄດໂອດໂມດູເລເຕີ. ແນະນຳໃຫ້ໃຊ້ໂຟໂຕໄດໂອດຄວບຄຸມສຳລັບການທົດລອງໃນຫ້ອງທົດລອງດ້ວຍສອງເຫດຜົນ. ໜຶ່ງ, ໂຟໂຕໄດໂອດຄວບຄຸມໄດ້ຮັບປະກັນຄຸນນະພາບ. ອັນທີສອງ, ມັນງ່າຍຕໍ່ການປັບຄວາມເຂັ້ມຂອງແສງທີ່ປ້ອນເຂົ້າ. ຖ້າໃຊ້ໂຟໂຕໄດໂອດພາຍໃນຂອງໂມດູເລເຕີ, ກະລຸນາຮັບປະກັນວ່າກະແສໄຟຟ້າອອກຂອງໂຟໂຕໄດໂອດແມ່ນສັດສ່ວນກັບພະລັງງານທີ່ປ້ອນເຂົ້າຢ່າງເຂັ້ມງວດ.
ບໍລິສັດ Rofea Optoelectronics ສະເໜີສາຍຜະລິດຕະພັນເຄື່ອງປັບແສງໄຟຟ້າທາງການຄ້າ, ເຄື່ອງປັບແສງໄລຍະ, ເຄື່ອງປັບຄວາມເຂັ້ມ, ເຄື່ອງກວດຈັບແສງ, ແຫຼ່ງແສງເລເຊີ, ເລເຊີ DFB, ເຄື່ອງຂະຫຍາຍແສງ, EDFA, ເລເຊີ SLD, ການປັບຄວາມເຂັ້ມ QPSK, ເລເຊີ Pulse, ເຄື່ອງກວດຈັບແສງ, ເຄື່ອງກວດຈັບແສງແບບສົມດຸນ, ໄດຣເວີເລເຊີ, ເຄື່ອງຂະຫຍາຍແສງໄຟເບີອໍບຕິກ, ເຄື່ອງວັດແທກພະລັງງານແສງ, ເລເຊີບຣອດແບນ, ເລເຊີທີ່ສາມາດປັບໄດ້, ເຄື່ອງກວດຈັບແສງ, ໄດຣເວີເລເຊີໄດໂອດ, ເຄື່ອງຂະຫຍາຍແສງໄຟເບີ. ພວກເຮົາຍັງສະໜອງເຄື່ອງປັບແສງພິເສດຫຼາຍຢ່າງສຳລັບການປັບແຕ່ງ, ເຊັ່ນ: ເຄື່ອງປັບແສງໄລຍະ 1*4, Vpi ຕ່ຳຫຼາຍ, ແລະ ເຄື່ອງປັບແສງອັດຕາສ່ວນການສູນເສຍສູງຫຼາຍ, ສ່ວນໃຫຍ່ໃຊ້ໃນມະຫາວິທະຍາໄລ ແລະ ສະຖາບັນຕ່າງໆ.
ຫວັງວ່າຜະລິດຕະພັນຂອງພວກເຮົາຈະເປັນປະໂຫຍດຕໍ່ທ່ານ ແລະ ການຄົ້ນຄວ້າຂອງທ່ານ.


