




ໂມດູນຄວບຄຸມຄວາມລຳອຽງອັດຕະໂນມັດ Rof Bias Point Controller ຂອງ lithium niobate MZ modulator

ຄຸນສົມບັດ
ມີຫຼາຍຮູບແບບການເຮັດວຽກທີ່ມີອະຄະຕິ (Quad+)↔ສີ່ສ່ວນ, ຕໍ່າສຸດ↔ສູງສຸດ)
ການສື່ສານແບບຕໍ່ເນື່ອງ, ການປັບແຕ່ງອັດຕະໂນມັດທີ່ຖືກຕັ້ງໂປຣແກຣມ ແລະ ການລັອກຈຸດອະຄະຕິ
ເຄື່ອງສົ່ງແສງອົງປະກອບພາຍໃນຮອງຮັບຄວາມຍາວຄື້ນທີ່ຫຼາກຫຼາຍ
ຊຸດໂມດູນ, ແຫຼ່ງຈ່າຍໄຟອະແດບເຕີ

ແອັບພລິເຄຊັນ
ການສື່ສານດ້ວຍເສັ້ນໄຍແກ້ວນຳແສງ
ໂຟຕອນໄມໂຄເວຟ
ການໃຊ້ແສງໄຟແບບກະພິບ
ປະສິດທິພາບ
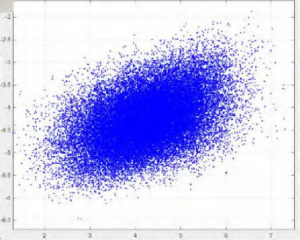
ຮູບທີ 1. ກຸ່ມດາວ (ບໍ່ມີຕົວຄວບຄຸມ)
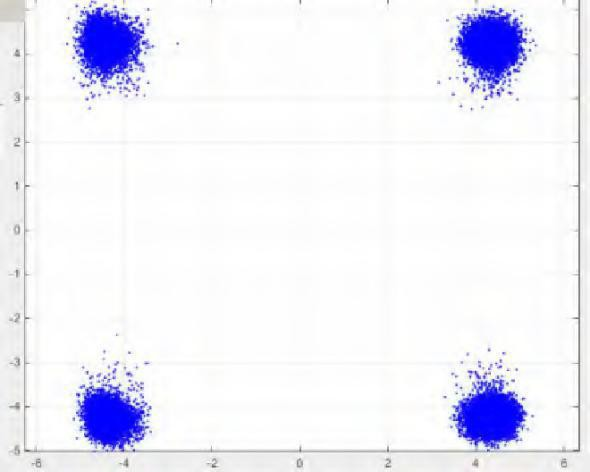
ຮູບທີ 2. ກຸ່ມດາວ QPSK (ພ້ອມຕົວຄວບຄຸມ)
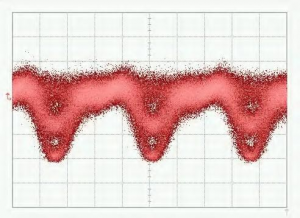
ຮູບທີ 3. ຮູບແບບ QPSK-Eye
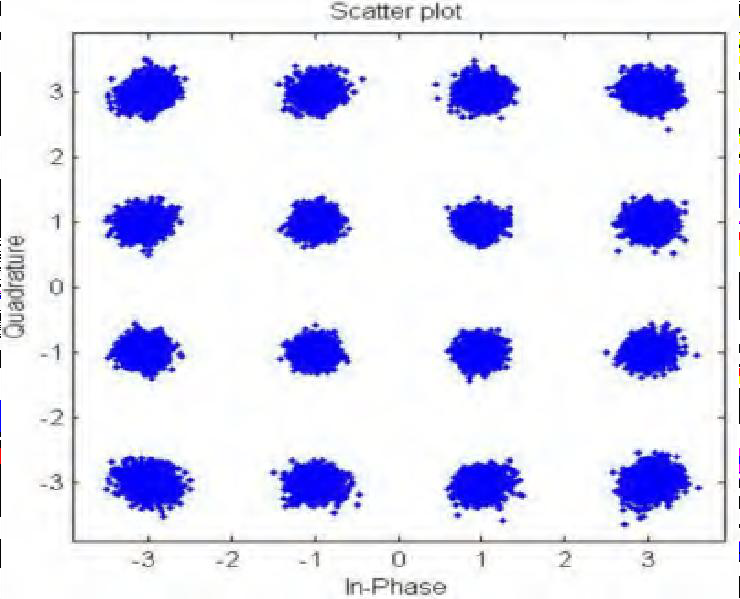
ຮູບທີ 5. ຮູບແບບກຸ່ມດາວ 16-QAM
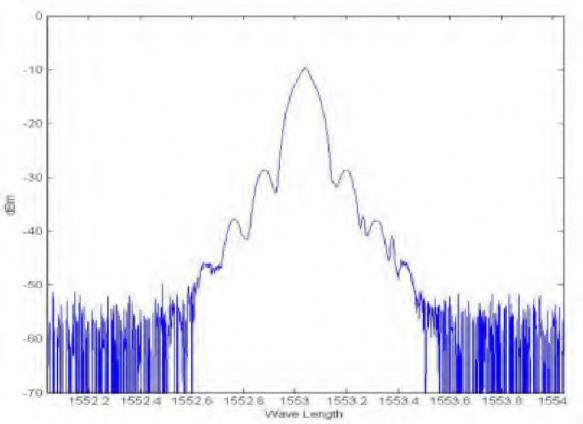
ຮູບທີ 4. ສະເປກຕຣຳ QPSK
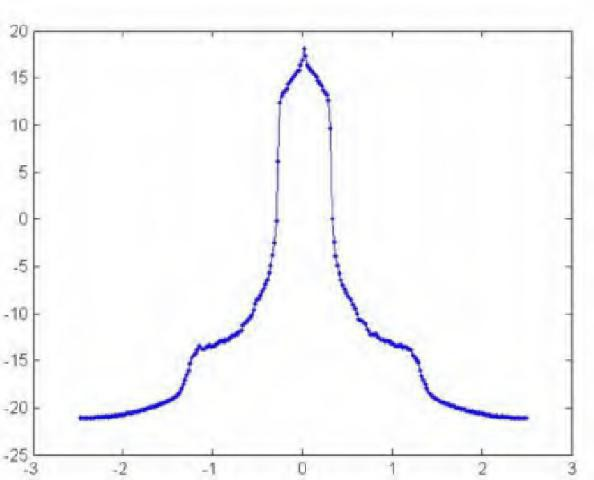
ຮູບທີ 6. ສະເປກຕຣຳ 16-QAM
ລາຍລະອຽດສະເພາະ
| Aການໂຕ້ຖຽງ | ນາທີ | ທົ່ວໄປ | ສູງສຸດ | ໜ່ວຍ |
| ພາລາມິເຕີທາງແສງ | ||||
| ພະລັງງານແສງປ້ອນຂໍ້ມູນ 1* | 0 | 13 | dBm | |
| ຄວາມຍາວຄື່ນປະຕິບັດການ 2* | 780 | 1650 | nm | |
| ການໂຕ້ຕອບຂອງເສັ້ນໄຍແກ້ວນໍາແສງ | FC/APC | |||
| ພາລາມິເຕີໄຟຟ້າ | ||||
| ແຮງດັນໄຟຟ້າອະຄະຕິ | -10 | 10 | V | |
| ອັດຕາສ່ວນການສູນເສຍຂອງສະວິດ 3* | 20 | 25 | 50 | dB |
| ພາກພື້ນທີ່ລັອກໂໝດ | ບວກ ຫຼື ລົບ | |||
| ໂໝດລັອກ | Quad+ (Quad-) ຫຼືນາທີ(ສູງສຸດ) | |||
| ຄວາມເລິກຂອງການມອດູເລດ (QUAD) | 1 | 2 | % | |
| ຄວາມເລິກຂອງການມອດດູເລຊັນ (Null) | 0.1 | % | ||
| ຄວາມຖີ່ຂອງການທົດລອງ (QUAD) | 1K | Hz | ||
| ຄວາມຖີ່ຂອງການທົດລອງ (NULL) | 2K | Hz | ||
| ພາລາມິເຕີທຳມະດາ | ||||
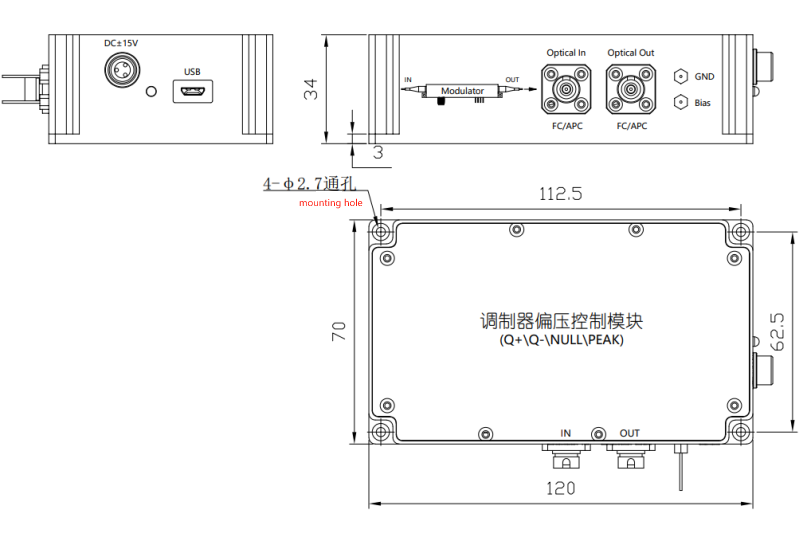
| ຂະໜາດ (ຄວາມຍາວ× ຄວາມກວ້າງ× ຄວາມໜາ) | 120×70×34 ມມ | |||
| ອຸນຫະພູມປະຕິບັດການ | 0 - 70℃ | |||
ໝາຍເຫດ:
1* ໝາຍເຖິງລະດັບພະລັງງານປ້ອນເຂົ້າໂມດູນເມື່ອຜົນຜະລິດຂອງໂມດູເລເຕີສູງສຸດ. ສຳລັບການຄວບຄຸມຈຸດຕໍ່າສຸດຂອງໂມດູເລເຕີທີ່ມີອັດຕາສ່ວນການສູນເສຍສູງ, ພະລັງງານປ້ອນເຂົ້າຄວນເພີ່ມຂຶ້ນຢ່າງເໝາະສົມ; ດ້ວຍຄວາມຕ້ອງການພະລັງງານປ້ອນເຂົ້າພິເສດ, ທ່ານສາມາດປັບຕົວເຊື່ອມຕໍ່ພາຍໃນ ແລະ ຕົວຊີ້ວັດການຮັບສັນຍານຂອງເຄື່ອງກວດຈັບ, ກະລຸນາປຶກສາຝ່າຍຂາຍເມື່ອວາງຄຳສັ່ງຊື້.
2* ເມື່ອວາງຄໍາສັ່ງຊື້, ກະລຸນາລະບຸຄວາມຍາວຄື້ນທີ່ເຮັດວຽກ, ເຊິ່ງຕ້ອງໄດ້ຮັບການປັບປຸງໃຫ້ດີທີ່ສຸດຕາມຄວາມຍາວຄື້ນທີ່ເຮັດວຽກ.
ອັດຕາສ່ວນການສູນເສຍການສະຫຼັບ 3* ຍັງຂຶ້ນກັບລະດັບອັດຕາສ່ວນການສູນເສຍການສະຫຼັບຂອງຕົວໂມດູເລດເອງ.
ຮູບແຕ້ມຂະໜາດ (ມມ)
ຂໍ້ມູນການສັ່ງຊື້
*ຖ້າທ່ານມີຄວາມຕ້ອງການພິເສດໃດໆ, ກະລຸນາຕິດຕໍ່ພະນັກງານຂາຍຂອງພວກເຮົາ
| ທະນາຄານກາງຂອງອົດສະຕຣາລີ | ເອບີຊີ | ປະເພດໂມດູເລເຕີ | XX | XX | XX |
| ໂມດູນຄວບຄຸມຈຸດອະຄະຕິອັດຕະໂນມັດ | MZ---M-ຊຕົວປັບສຽງ | ຄວາມຍາວຄື້ນເຮັດວຽກ: 15---1550nm 13---1310nm 10---1064nm 08---850nm 07---780nm | ປະເພດເສັ້ນໄຍ: S-- ເສັ້ນໄຍແກ້ວນຳແສງແບບດຽວ P - ເສັ້ນໄຍຮັກສາຂົ້ວ | ການໂຕ້ຕອບຂອງເສັ້ນໄຍແກ້ວນໍາແສງ: FA—FC/APC FP---FC/UPC |
ອິນເຕີເຟດຜູ້ໃຊ້
| ກຸ່ມ | ການດຳເນີນງານ | ຄຳອະທິບາຍ |
| ຕັ້ງຄ່າໃໝ່ | ໃສ່ສາຍຈູມ ແລະ ດຶງອອກຫຼັງຈາກ 1 ວິນາທີ | ຣີເຊັດຕົວຄວບຄຸມ |
| ພະລັງງານ | ແຫຼ່ງພະລັງງານສຳລັບຕົວຄວບຄຸມຄວາມລຳອຽງ | V- ເຊື່ອມຕໍ່ເອເລັກໂຕຣດລົບຂອງແຫຼ່ງຈ່າຍໄຟ |
| V+ ເຊື່ອມຕໍ່ຂົ້ວບວກຂອງແຫຼ່ງຈ່າຍໄຟ | ||
| ພອດກາງເຊື່ອມຕໍ່ກັບເອເລັກໂຕຣດດິນ | ||
| ຂົ້ວໂລກ1 | PLRI: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Null; ມີຕົວເຊື່ອມຕໍ່: ໂໝດສູງສຸດ |
| PLRQ: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Null; ມີຕົວເຊື່ອມຕໍ່: ໂໝດສູງສຸດ | |
| PLRP: ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Q+; ມີຕົວເຊື່ອມຕໍ່: ໂໝດ Q- | |
| LED | ເປີດຢູ່ຕະຫຼອດເວລາ | ເຮັດວຽກພາຍໃຕ້ສະພາບທີ່ໝັ້ນຄົງ |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 0.2 ວິນາທີ | ການປະມວນຜົນຂໍ້ມູນ ແລະ ການຄົ້ນຫາຈຸດຄວບຄຸມ | |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 1 ວິນາທີ | ພະລັງງານແສງປ້ອນຂໍ້ມູນອ່ອນແອເກີນໄປ | |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 3 ວິນາທີ | ພະລັງງານແສງອິນພຸດແຮງເກີນໄປ | |
| PD2 | ເຊື່ອມຕໍ່ກັບໂຟໂຕໄດໂອດ | ພອດ PD ເຊື່ອມຕໍ່ Cathode ຂອງ photodiode |
| ພອດ GND ເຊື່ອມຕໍ່ Anode ຂອງ photodiode | ||
| ແຮງດັນໄຟຟ້າອະຄະຕິ | ໃນ, Ip: ແຮງດັນອະຄະຕິສຳລັບແຂນ I | Ip: ດ້ານບວກ; ໃນ: ດ້ານລົບ ຫຼື ພື້ນດິນ |
| Qn, Qp: ແຮງດັນອະຄະຕິສຳລັບແຂນ Q | Qp: ດ້ານບວກ; Qn: ດ້ານລົບ ຫຼື ພື້ນດິນ | |
| Pn, Pp: ແຮງດັນໄຟຟ້າອະຄະຕິສຳລັບແຂນ P | Pp: ດ້ານບວກ; Pn: ດ້ານລົບ ຫຼື ພື້ນດິນ | |
| UART | ໃຊ້ຕົວຄວບຄຸມຜ່ານ UART | 3.3: ແຮງດັນອ້າງອີງ 3.3V |
| GND: ພື້ນດິນ | ||
| RX: ຮັບຂອງຕົວຄວບຄຸມ | ||
| TX: ສົ່ງຕໍ່ຂອງຕົວຄວບຄຸມ |
1 ຂົ້ວຂຶ້ນກັບສັນຍານ RF ຂອງລະບົບ. ເມື່ອບໍ່ມີສັນຍານ RF ຢູ່ໃນລະບົບ, ຂົ້ວຄວນຈະເປັນບວກ. ເມື່ອສັນຍານ RF ມີແອມພລິຈູດຫຼາຍກວ່າລະດັບໃດໜຶ່ງ, ຂົ້ວຈະປ່ຽນຈາກບວກໄປເປັນລົບ. ໃນເວລານີ້, ຈຸດ Null ແລະຈຸດສູງສຸດຈະສະຫຼັບກັນ. ຈຸດ Q+ ແລະຈຸດ Q- ຈະສະຫຼັບກັນເຊັ່ນກັນ. ສະຫຼັບຂົ້ວຊ່ວຍໃຫ້ຜູ້ໃຊ້ສາມາດປ່ຽນຂົ້ວໄດ້
ໂດຍກົງໂດຍບໍ່ຕ້ອງປ່ຽນຈຸດປະຕິບັດງານ.
2ຄວນເລືອກພຽງທາງເລືອກດຽວເທົ່ານັ້ນລະຫວ່າງການໃຊ້ໂຟໂຕໄດໂອດຄວບຄຸມ ຫຼື ການໃຊ້ໂຟໂຕໄດໂອດໂມດູເລເຕີ. ແນະນຳໃຫ້ໃຊ້ໂຟໂຕໄດໂອດຄວບຄຸມສຳລັບການທົດລອງໃນຫ້ອງທົດລອງດ້ວຍສອງເຫດຜົນ. ໜຶ່ງ, ໂຟໂຕໄດໂອດຄວບຄຸມໄດ້ຮັບປະກັນຄຸນນະພາບ. ອັນທີສອງ, ມັນງ່າຍຕໍ່ການປັບຄວາມເຂັ້ມຂອງແສງທີ່ປ້ອນເຂົ້າ. ຖ້າໃຊ້ໂຟໂຕໄດໂອດພາຍໃນຂອງໂມດູເລເຕີ, ກະລຸນາຮັບປະກັນວ່າກະແສໄຟຟ້າອອກຂອງໂຟໂຕໄດໂອດແມ່ນສັດສ່ວນກັບພະລັງງານທີ່ປ້ອນເຂົ້າຢ່າງເຂັ້ມງວດ.
ບໍລິສັດ Rofea Optoelectronics ສະເໜີສາຍຜະລິດຕະພັນເຄື່ອງປັບແສງໄຟຟ້າທາງການຄ້າ, ເຄື່ອງປັບແສງໄລຍະ, ເຄື່ອງປັບຄວາມເຂັ້ມ, ເຄື່ອງກວດຈັບແສງ, ແຫຼ່ງແສງເລເຊີ, ເລເຊີ DFB, ເຄື່ອງຂະຫຍາຍແສງ, EDFA, ເລເຊີ SLD, ການປັບຄວາມເຂັ້ມ QPSK, ເລເຊີ Pulse, ເຄື່ອງກວດຈັບແສງ, ເຄື່ອງກວດຈັບແສງແບບສົມດຸນ, ໄດຣເວີເລເຊີ, ເຄື່ອງຂະຫຍາຍແສງໄຟເບີອໍບຕິກ, ເຄື່ອງວັດແທກພະລັງງານແສງ, ເລເຊີບຣອດແບນ, ເລເຊີທີ່ສາມາດປັບໄດ້, ເຄື່ອງກວດຈັບແສງ, ໄດຣເວີເລເຊີໄດໂອດ, ເຄື່ອງຂະຫຍາຍແສງໄຟເບີ. ພວກເຮົາຍັງສະໜອງເຄື່ອງປັບແສງພິເສດຫຼາຍຢ່າງສຳລັບການປັບແຕ່ງ, ເຊັ່ນ: ເຄື່ອງປັບແສງໄລຍະ 1*4, Vpi ຕ່ຳຫຼາຍ, ແລະ ເຄື່ອງປັບແສງອັດຕາສ່ວນການສູນເສຍສູງຫຼາຍ, ສ່ວນໃຫຍ່ໃຊ້ໃນມະຫາວິທະຍາໄລ ແລະ ສະຖາບັນຕ່າງໆ.
ຫວັງວ່າຜະລິດຕະພັນຂອງພວກເຮົາຈະເປັນປະໂຫຍດຕໍ່ທ່ານ ແລະ ການຄົ້ນຄວ້າຂອງທ່ານ.


