




ພາບລວມຂອງໂມດູເລດທົ່ວໄປສີ່ຢ່າງ
ເອກະສານສະບັບນີ້ແນະນຳວິທີການປັບຄວາມຖີ່ຂອງແສງສີ່ວິທີ (ການປ່ຽນແປງຄວາມກວ້າງຂອງເລເຊີໃນໂດເມນເວລາ nanosecond ຫຼື subnanosecond) ທີ່ໃຊ້ກັນຫຼາຍທີ່ສຸດໃນລະບົບເລເຊີເສັ້ນໄຍ. ເຫຼົ່ານີ້ລວມມີ AOM (ການປັບຄວາມຖີ່ຂອງແສງດ້ວຍສຽງ), EOM (ການປັບຄວາມຖີ່ດ້ວຍໄຟຟ້າ), SOM/SOA(ການຂະຫຍາຍແສງຂອງຕົວນຳ ຫຼື ທີ່ຮູ້ຈັກກັນໃນນາມການປັບຄວາມຖີ່ຂອງຕົວນຳ), ແລະການປັບປ່ຽນເລເຊີໂດຍກົງໃນນັ້ນ, AOM,EOM,SOM ເປັນຂອງການປັບປ່ຽນພາຍນອກ, ຫຼືການປັບປ່ຽນທາງອ້ອມ.
1. ຕົວປັບສຽງ-ແສງ (AOM)
ການປັບປ່ຽນສຽງ-ແສງແມ່ນຂະບວນການທາງກາຍະພາບທີ່ໃຊ້ຜົນກະທົບຂອງສຽງ-ແສງເພື່ອໂຫຼດຂໍ້ມູນໃສ່ຕົວນຳແສງ. ເມື່ອປັບປ່ຽນ, ສັນຍານໄຟຟ້າ (ການປັບປ່ຽນຄວາມກວ້າງຂອງສຽງ) ຈະຖືກນຳໃຊ້ກັບຕົວປ່ຽນສຽງໄຟຟ້າ, ເຊິ່ງຈະປ່ຽນສັນຍານໄຟຟ້າໄປເປັນສະໜາມອັລຕຣາຊາວ. ເມື່ອຄື້ນແສງຜ່ານຕົວກາງສຽງ-ແສງ, ຕົວນຳແສງຈະຖືກປັບປ່ຽນ ແລະ ກາຍເປັນຄື້ນປັບປ່ຽນຄວາມເຂັ້ມທີ່ນຳຂໍ້ມູນເນື່ອງຈາກການກະທຳຂອງສຽງ-ແສງ.
2. ຕົວດັດແປງໄຟຟ້າແສງ(ອີໂອເອັມ)
ຕົວປັບແສງໄຟຟ້າແມ່ນຕົວປັບແສງທີ່ນຳໃຊ້ຜົນກະທົບທາງໄຟຟ້າຂອງຜລຶກແສງໄຟຟ້າບາງຊະນິດ, ເຊັ່ນ: ຜລຶກລິທຽມໄນໂອເບດ (LiNb03), ຜລຶກ GaAs (GaAs) ແລະ ຜລຶກລິທຽມແທນທາເລດ (LiTa03). ຜົນກະທົບທາງໄຟຟ້າແມ່ນວ່າເມື່ອແຮງດັນຖືກນຳໃຊ້ກັບຜລຶກໄຟຟ້າ, ດັດຊະນີການຫັກເຫຂອງຜລຶກໄຟຟ້າຈະປ່ຽນແປງ, ເຊິ່ງສົ່ງຜົນໃຫ້ມີການປ່ຽນແປງໃນລັກສະນະຄື້ນແສງຂອງຜລຶກ, ແລະ ການປັບປ່ຽນເຟສ, ຄວາມກວ້າງ, ຄວາມເຂັ້ມ ແລະ ສະຖານະໂພລາໄຣເຊຊັນຂອງສັນຍານແສງຈະຖືກຮັບຮູ້.
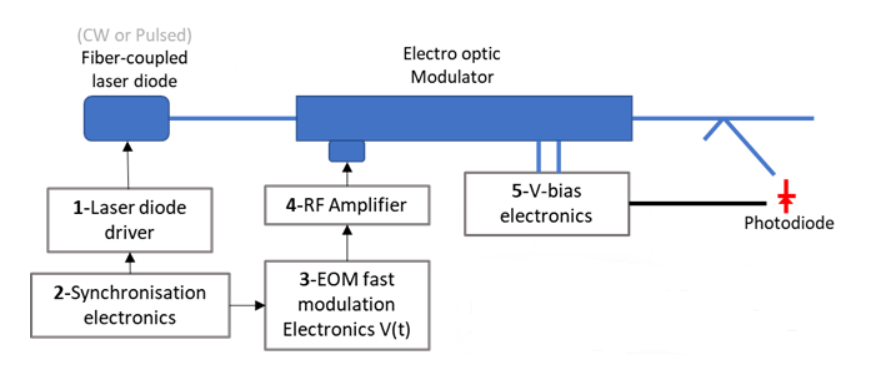
ຮູບພາບ: ການຕັ້ງຄ່າທົ່ວໄປຂອງວົງຈອນຂັບ EOM
3. ຕົວດັດແປງແສງເຄິ່ງຕົວນຳ/ຕົວຂະຫຍາຍແສງເຄິ່ງຕົວນຳ (SOM/SOA)
ເຄື່ອງຂະຫຍາຍສັນຍານແສງແບບເຄິ່ງຕົວນຳ (SOA) ມັກຈະຖືກໃຊ້ສຳລັບການຂະຫຍາຍສັນຍານແສງ, ເຊິ່ງມີຂໍ້ດີຂອງຊິບ, ການໃຊ້ພະລັງງານຕ່ຳ, ຮອງຮັບທຸກແຖບຄວາມຖີ່, ແລະອື່ນໆ, ແລະເປັນທາງເລືອກໃນອະນາຄົດແທນເຄື່ອງຂະຫຍາຍສັນຍານແສງແບບດັ້ງເດີມເຊັ່ນ EDFA (ເຄື່ອງຂະຫຍາຍສັນຍານເສັ້ນໄຍທີ່ມີສ່ວນປະກອບຂອງ Erbium). ຕົວປັບສັນຍານແສງເຄິ່ງຕົວນຳ (SOM) ແມ່ນອຸປະກອນດຽວກັນກັບຕົວຂະຫຍາຍສັນຍານແສງເຄິ່ງຕົວນຳ, ແຕ່ວິທີການນຳໃຊ້ມັນແຕກຕ່າງຈາກວິທີທີ່ໃຊ້ກັບຕົວຂະຫຍາຍສັນຍານ SOA ແບບດັ້ງເດີມເລັກນ້ອຍ, ແລະຕົວຊີ້ວັດທີ່ມັນສຸມໃສ່ເມື່ອມັນຖືກໃຊ້ເປັນຕົວປັບສັນຍານແສງແມ່ນແຕກຕ່າງຈາກຕົວຂະຫຍາຍສັນຍານທີ່ໃຊ້ເປັນຕົວຂະຫຍາຍສັນຍານເລັກນ້ອຍ. ເມື່ອໃຊ້ສຳລັບການຂະຫຍາຍສັນຍານແສງ, ກະແສໄຟຟ້າຂັບເຄື່ອນທີ່ໝັ້ນຄົງມັກຈະຖືກສະໜອງໃຫ້ SOA ເພື່ອຮັບປະກັນວ່າ SOA ເຮັດວຽກຢູ່ໃນພາກພື້ນເສັ້ນຊື່; ເມື່ອມັນຖືກໃຊ້ເພື່ອປັບສັນຍານແສງ, ມັນຈະປ້ອນສັນຍານແສງຢ່າງຕໍ່ເນື່ອງໄປຫາ SOA, ໃຊ້ກະແສໄຟຟ້າເພື່ອຄວບຄຸມກະແສໄຟຟ້າຂັບເຄື່ອນ SOA, ແລະຫຼັງຈາກນັ້ນຄວບຄຸມສະຖານະຜົນຜະລິດ SOA ເປັນການຂະຫຍາຍ/ຫຼຸດຜ່ອນ. ໂດຍການໃຊ້ຄຸນລັກສະນະການຂະຫຍາຍ ແລະ ການຫຼຸດຜົນກະທົບຂອງ SOA, ຮູບແບບການປັບສັນຍານນີ້ໄດ້ຖືກນຳໃຊ້ເທື່ອລະກ້າວກັບບາງການນຳໃຊ້ໃໝ່, ເຊັ່ນ: ການຮັບຮູ້ເສັ້ນໄຍແສງ, LiDAR, ການຖ່າຍພາບທາງການແພດ OCT ແລະຂົງເຂດອື່ນໆ. ໂດຍສະເພາະສຳລັບບາງສະຖານະການທີ່ຕ້ອງການປະລິມານທີ່ຂ້ອນຂ້າງສູງ, ການໃຊ້ພະລັງງານ ແລະ ອັດຕາສ່ວນການສູນເສຍ.
4. ການປັບປ່ຽນໂດຍກົງຂອງເລເຊີຍັງສາມາດປັບປ່ຽນສັນຍານທາງແສງໄດ້ໂດຍການຄວບຄຸມກະແສໄຟຟ້າອະຄະຕິຂອງເລເຊີໂດຍກົງ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້, ຄວາມກວ້າງຂອງກຳມະຈອນ 3 ນາໂນວິນາທີແມ່ນໄດ້ຮັບຜ່ານການປັບປ່ຽນໂດຍກົງ. ສາມາດເຫັນໄດ້ວ່າມີການເພີ່ມຂຶ້ນຂອງກຳມະຈອນຢູ່ຈຸດເລີ່ມຕົ້ນຂອງກຳມະຈອນ, ເຊິ່ງເກີດຈາກການຜ່ອນຄາຍຂອງຕົວນຳເລເຊີ. ຖ້າທ່ານຕ້ອງການໃຫ້ກຳມະຈອນປະມານ 100 picoseconds, ທ່ານສາມາດໃຊ້ການເພີ່ມຂຶ້ນຂອງກຳມະຈອນນີ້ໄດ້. ແຕ່ໂດຍປົກກະຕິແລ້ວພວກເຮົາບໍ່ຕ້ອງການໃຫ້ມີການເພີ່ມຂຶ້ນຂອງກຳມະຈອນນີ້.
ສະຫຼຸບ
AOM ເໝາະສົມກັບຜົນຜະລິດພະລັງງານແສງໃນສອງສາມວັດ ແລະ ມີໜ້າທີ່ປ່ຽນຄວາມຖີ່. EOM ໄວ, ແຕ່ຄວາມຊັບຊ້ອນຂອງໄດຣຟ໌ແມ່ນສູງ ແລະ ອັດຕາສ່ວນການສູນເສຍແມ່ນຕໍ່າ. SOM (SOA) ແມ່ນທາງອອກທີ່ດີທີ່ສຸດສຳລັບຄວາມໄວ GHz ແລະ ອັດຕາສ່ວນການສູນເສຍສູງ, ມີການໃຊ້ພະລັງງານຕໍ່າ, ການຫຍໍ້ ແລະ ຄຸນສົມບັດອື່ນໆ. ໄດໂອດເລເຊີໂດຍກົງແມ່ນທາງອອກທີ່ລາຄາຖືກທີ່ສຸດ, ແຕ່ຕ້ອງຮູ້ເຖິງການປ່ຽນແປງໃນລັກສະນະສະເປກຕຣຳ. ແຕ່ລະໂຄງການມອດູເລດມີຂໍ້ດີ ແລະ ຂໍ້ເສຍຂອງມັນເອງ, ແລະ ມັນເປັນສິ່ງສຳຄັນທີ່ຈະຕ້ອງເຂົ້າໃຈຄວາມຕ້ອງການຂອງການນຳໃຊ້ຢ່າງຖືກຕ້ອງເມື່ອເລືອກໂຄງການ, ແລະ ຄຸ້ນເຄີຍກັບຂໍ້ດີ ແລະ ຂໍ້ເສຍຂອງແຕ່ລະໂຄງການ, ແລະ ເລືອກໂຄງການທີ່ເໝາະສົມທີ່ສຸດ. ຕົວຢ່າງ, ໃນການຮັບຮູ້ເສັ້ນໄຍແບບກະຈາຍ, AOM ແບບດັ້ງເດີມແມ່ນຫຼັກ, ແຕ່ໃນບາງການອອກແບບລະບົບໃໝ່, ການນຳໃຊ້ໂຄງການ SOA ກຳລັງເຕີບໂຕຢ່າງໄວວາ, ໃນບາງໂຄງການ liDAR ລົມແບບດັ້ງເດີມໃຊ້ AOM ສອງຂັ້ນຕອນ, ການອອກແບບໂຄງການໃໝ່ເພື່ອຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍ, ຫຼຸດຜ່ອນຂະໜາດ, ແລະ ປັບປຸງອັດຕາສ່ວນການສູນເສຍ, ໂຄງການ SOA ຖືກຮັບຮອງເອົາ. ໃນລະບົບການສື່ສານ, ລະບົບຄວາມໄວຕ່ຳມັກຈະຮັບຮອງເອົາໂຄງການມອດູເລດໂດຍກົງ, ແລະ ລະບົບຄວາມໄວສູງມັກຈະໃຊ້ໂຄງການມອດູເລດໄຟຟ້າ.
ເວລາໂພສ: ພະຈິກ-26-2024