




ຮຽນຮູ້ເລເຊີເຕັກນິກການຈັດລຽນ
ການຮັບປະກັນການຈັດລຽງລຳແສງເລເຊີແມ່ນໜ້າວຽກຫຼັກຂອງຂະບວນການຈັດລຽງລຳແສງ. ອັນນີ້ອາດຈະຕ້ອງການໃຊ້ອຸປະກອນເສີມເຊັ່ນ: ເລນ ຫຼື ເຄື່ອງປັບຄວາມຄົມຊັດຂອງເສັ້ນໄຍ, ໂດຍສະເພາະສຳລັບໄດໂອດ ຫຼືແຫຼ່ງເລເຊີເສັ້ນໄຍກ່ອນທີ່ຈະປັບເລເຊີ, ທ່ານຕ້ອງຄຸ້ນເຄີຍກັບຂັ້ນຕອນຄວາມປອດໄພຂອງເລເຊີ ແລະ ຮັບປະກັນວ່າທ່ານໄດ້ໃສ່ແວ່ນຕາຄວາມປອດໄພທີ່ເໝາະສົມສຳລັບການກີດຂວາງຄວາມຍາວຄື້ນເລເຊີ. ນອກຈາກນັ້ນ, ສຳລັບເລເຊີທີ່ເບິ່ງບໍ່ເຫັນ, ອາດຈະຕ້ອງມີບັດກວດຈັບເພື່ອຊ່ວຍໃນຄວາມພະຍາຍາມປັບເລເຊີ.
ໃນການຈັດລຽນເລເຊີ, ມຸມ ແລະ ຕຳແໜ່ງຂອງລຳແສງຈຳເປັນຕ້ອງໄດ້ຄວບຄຸມພ້ອມໆກັນ. ອັນນີ້ສາມາດຕ້ອງການໃຊ້ຫຼາຍ optics, ເພີ່ມຄວາມສັບສົນໃຫ້ກັບການຕັ້ງຄ່າການຈັດລຽນ, ແລະ ສາມາດໃຊ້ພື້ນທີ່ desktop ຫຼາຍ. ຢ່າງໃດກໍຕາມ, ດ້ວຍຕົວຍຶດ kinematic, ວິທີແກ້ໄຂທີ່ງ່າຍດາຍ ແລະ ມີປະສິດທິພາບສາມາດນຳໃຊ້ໄດ້, ໂດຍສະເພາະສຳລັບການນຳໃຊ້ທີ່ມີພື້ນທີ່ຈຳກັດ.
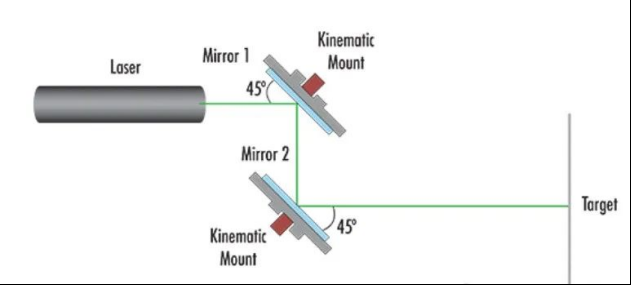
ຮູບທີ 1: ໂຄງສ້າງຂະໜານ (ຮູບຕົວ Z)
ຮູບທີ 1 ສະແດງໃຫ້ເຫັນການຕັ້ງຄ່າພື້ນຖານຂອງໂຄງສ້າງ Z-Fold ແລະສະແດງເຫດຜົນທີ່ຢູ່ເບື້ອງຫຼັງຊື່. ກະຈົກສອງອັນທີ່ຕິດຕັ້ງຢູ່ເທິງຕົວຍຶດ kinematic ສອງອັນແມ່ນໃຊ້ສຳລັບການຍ້າຍມຸມ ແລະຖືກວາງຕຳແໜ່ງເພື່ອໃຫ້ລຳແສງຕົກกระทบກັບໜ້າກະຈົກຂອງກະຈົກແຕ່ລະອັນໃນມຸມດຽວກັນ. ເພື່ອເຮັດໃຫ້ການຕັ້ງຄ່າງ່າຍຂຶ້ນ, ໃຫ້ວາງກະຈົກສອງອັນຢູ່ທີ່ປະມານ 45°. ໃນການຕັ້ງຄ່ານີ້, ຕົວຮອງຮັບ kinematic ທຳອິດແມ່ນໃຊ້ເພື່ອໃຫ້ໄດ້ຕຳແໜ່ງຕັ້ງ ແລະ ນອນທີ່ຕ້ອງການຂອງລຳແສງ, ໃນຂະນະທີ່ຕົວຮອງຮັບທີສອງແມ່ນໃຊ້ເພື່ອຊົດເຊີຍມຸມ. ໂຄງສ້າງ Z-Fold ແມ່ນວິທີການທີ່ຕ້ອງການສຳລັບການແນມລຳແສງເລເຊີຫຼາຍອັນໄປທີ່ເປົ້າໝາຍດຽວກັນ. ເມື່ອລວມເລເຊີທີ່ມີຄວາມຍາວຄື້ນທີ່ແຕກຕ່າງກັນ, ກະຈົກໜຶ່ງອັນ ຫຼື ຫຼາຍອັນອາດຈະຕ້ອງໄດ້ປ່ຽນແທນດ້ວຍຕົວກອງ dichroic.
ເພື່ອຫຼຸດຜ່ອນການຊໍ້າຊ້ອນໃນຂະບວນການຈັດລຽນ, ເລເຊີສາມາດຈັດລຽນໄດ້ທີ່ຈຸດອ້າງອີງສອງຈຸດແຍກຕ່າງຫາກ. ເຄື່ອງໝາຍກາໝາຍງ່າຍໆ ຫຼື ບັດສີຂາວທີ່ໝາຍດ້ວຍເຄື່ອງໝາຍ X ແມ່ນເຄື່ອງມືທີ່ເປັນປະໂຫຍດຫຼາຍ. ກ່ອນອື່ນໝົດ, ຕັ້ງຈຸດອ້າງອີງທຳອິດໄວ້ເທິງ ຫຼື ໃກ້ກັບໜ້າດິນຂອງກະຈົກ 2, ໃຫ້ໃກ້ກັບເປົ້າໝາຍທີ່ສຸດເທົ່າທີ່ຈະເປັນໄປໄດ້. ຈຸດອ້າງອີງທີສອງແມ່ນເປົ້າໝາຍເອງ. ໃຊ້ຂາຕັ້ງ kinematic ທຳອິດເພື່ອປັບຕຳແໜ່ງແນວນອນ (X) ແລະ ແນວຕັ້ງ (Y) ຂອງລຳແສງຢູ່ຈຸດອ້າງອີງເບື້ອງຕົ້ນ ເພື່ອໃຫ້ມັນກົງກັບຕຳແໜ່ງທີ່ຕ້ອງການຂອງເປົ້າໝາຍ. ເມື່ອຮອດຕຳແໜ່ງນີ້ແລ້ວ, ຂາຕັ້ງ kinematic ທີສອງຈະຖືກນໍາໃຊ້ເພື່ອປັບຄ່າຊົດເຊີຍມຸມ, ໂດຍແນໃສ່ລຳແສງເລເຊີໄປທີ່ເປົ້າໝາຍຕົວຈິງ. ກະຈົກທຳອິດຖືກໃຊ້ເພື່ອປະມານການຈັດລຽນທີ່ຕ້ອງການ, ໃນຂະນະທີ່ກະຈົກທີສອງຖືກໃຊ້ເພື່ອປັບແຕ່ງການຈັດລຽນຂອງຈຸດອ້າງອີງທີສອງ ຫຼື ເປົ້າໝາຍ.
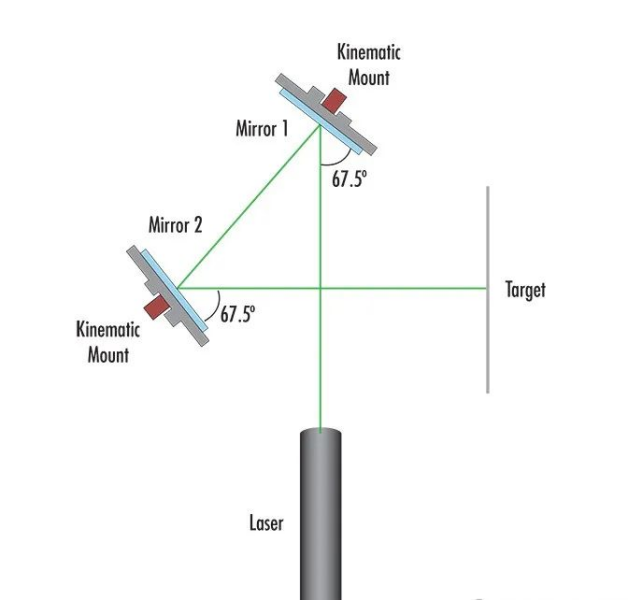
ຮູບທີ 2: ໂຄງສ້າງແນວຕັ້ງ (ຮູບທີ 4)
ໂຄງສ້າງຮູບທີ 4 ມີຄວາມຊັບຊ້ອນຫຼາຍກວ່າຮູບທີ Z-Fold, ແຕ່ສາມາດໃຫ້ຮູບແບບລະບົບທີ່ກະທັດຮັດກວ່າ. ຄ້າຍຄືກັນກັບໂຄງສ້າງຮູບທີ Z-Fold, ຮູບແບບຮູບທີ 4 ໃຊ້ກະຈົກສອງອັນທີ່ຕິດຕັ້ງຢູ່ເທິງວົງເລັບທີ່ເຄື່ອນທີ່. ຢ່າງໃດກໍຕາມ, ບໍ່ເຫມືອນກັບໂຄງສ້າງຮູບທີ Z-Fold, ກະຈົກຖືກຕິດຕັ້ງຢູ່ທີ່ມຸມ 67.5°, ເຊິ່ງປະກອບເປັນຮູບຊົງ “4″ ດ້ວຍລຳແສງເລເຊີ (ຮູບທີ 2). ການຕັ້ງຄ່ານີ້ຊ່ວຍໃຫ້ຕົວສະທ້ອນແສງ 2 ສາມາດວາງໄວ້ຫ່າງຈາກເສັ້ນທາງລຳແສງເລເຊີແຫຼ່ງກຳເນີດ. ເຊັ່ນດຽວກັນກັບການຕັ້ງຄ່າຮູບທີ Z-Fold,ລັງສີເລເຊີຄວນຖືກຈັດລຽນຢູ່ຈຸດອ້າງອີງສອງຈຸດ, ຈຸດອ້າງອີງທຳອິດຢູ່ທີ່ກະຈົກ 2 ແລະ ຈຸດທີສອງຢູ່ທີ່ເປົ້າໝາຍ. ວົງເລັບ kinematic ທຳອິດຖືກນຳໃຊ້ເພື່ອຍ້າຍຈຸດເລເຊີໄປຫາຕຳແໜ່ງ XY ທີ່ຕ້ອງການຢູ່ເທິງໜ້າດິນຂອງກະຈົກທີສອງ. ຫຼັງຈາກນັ້ນ, ວົງເລັບ kinematic ທີສອງຄວນຖືກນຳໃຊ້ເພື່ອຊົດເຊີຍການຍ້າຍມຸມ ແລະ ປັບການຈັດລຽນໃຫ້ລະອຽດຢູ່ເທິງເປົ້າໝາຍ.
ບໍ່ວ່າຈະໃຊ້ການຕັ້ງຄ່າໃດໃນສອງແບບ, ການປະຕິບັດຕາມຂັ້ນຕອນຂ້າງເທິງຄວນຫຼຸດຜ່ອນຈຳນວນການເຮັດຊ້ຳທີ່ຕ້ອງການເພື່ອໃຫ້ໄດ້ຜົນທີ່ຕ້ອງການ. ດ້ວຍເຄື່ອງມື ແລະ ອຸປະກອນທີ່ຖືກຕ້ອງ ແລະ ຄຳແນະນຳງ່າຍໆສອງສາມຢ່າງ, ການຈັດລຽນເລເຊີສາມາດງ່າຍຂຶ້ນໄດ້ຫຼາຍ.
ເວລາໂພສ: ມີນາ-11-2024