




ຕົວຄວບຄຸມຄວາມລຳອຽງອັດຕະໂນມັດ MZM ໂມດູເລເຕີຄວາມແມ່ນຍຳສູງ


ຄຸນສົມບັດ
• ການຄວບຄຸມແຮງດັນອະຄະຕິໃນຈຸດສູງສຸດ/ຈຸດສູນ/Q+/Q−
• ການຄວບຄຸມແຮງດັນໄຟຟ້າອະຄະຕິໃນຈຸດທີ່ບໍ່ຂຶ້ນກັບໃຜ
• ການຄວບຄຸມທີ່ຊັດເຈນສູງສຸດ: ອັດຕາສ່ວນການສູນເສຍສູງສຸດ 50dB ໃນໂໝດ Null;
ຄວາມຖືກຕ້ອງ ±0.5◦ ໃນໂໝດ Q+ ແລະ Q−
• ແອມພລິຈູດໄດເທີຕ່ຳ:
0.1% Vπ ຢູ່ໃນໂໝດ NULL ແລະ ໂໝດ PEAK
2% Vπ ຢູ່ໃນໂໝດ Q+ ແລະ ໂໝດ Q−
• ຄວາມໝັ້ນຄົງສູງ: ດ້ວຍການນຳໃຊ້ດິຈິຕອນຢ່າງຄົບຖ້ວນ
• ໂປຣໄຟລ໌ຕ່ຳ: 40 ມມ (ກວ້າງ) × 30 ມມ (ເລິກ) × 10 ມມ (ສູງ)
• ງ່າຍຕໍ່ການໃຊ້: ການດໍາເນີນງານດ້ວຍມືດ້ວຍຕົວເຊື່ອມຕໍ່ຂະໜາດນ້ອຍ;
ການດຳເນີນງານ OEM ທີ່ມີຄວາມຍືດຫຍຸ່ນຜ່ານ MCU UART2
• ສອງຮູບແບບທີ່ແຕກຕ່າງກັນເພື່ອສະໜອງແຮງດັນໄບອັດໂນມັດ: ກ. ການຄວບຄຸມໄບອັດໂນມັດອັດຕະໂນມັດ
ຂ. ແຮງດັນໄຟຟ້າອະຄະຕິທີ່ຜູ້ໃຊ້ກຳນົດ

ແອັບພລິເຄຊັນ
• LiNbO3 ແລະຕົວປັບ MZ ອື່ນໆ
• NRZ ດິຈິຕອນ, RZ
• ການໃຊ້ Pulse
• ລະບົບການກະແຈກກະຈາຍ Brillouin ແລະເຊັນເຊີທາງແສງອື່ນໆ
• ເຄື່ອງສົ່ງສັນຍານ CATV
ປະສິດທິພາບ
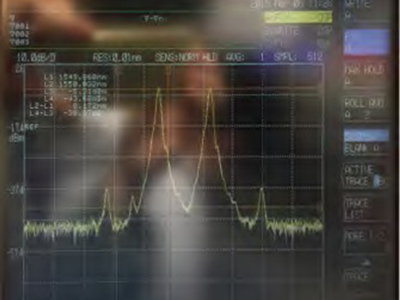
ຮູບທີ 1. ການສະກັດກັ້ນພາຫະນະ
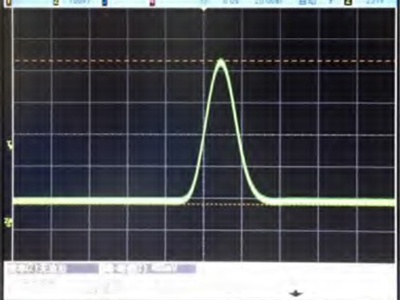
ຮູບທີ 2. ການສ້າງກຳມະຈອນ

ຮູບທີ 3. ພະລັງງານສູງສຸດຂອງຕົວປັບ
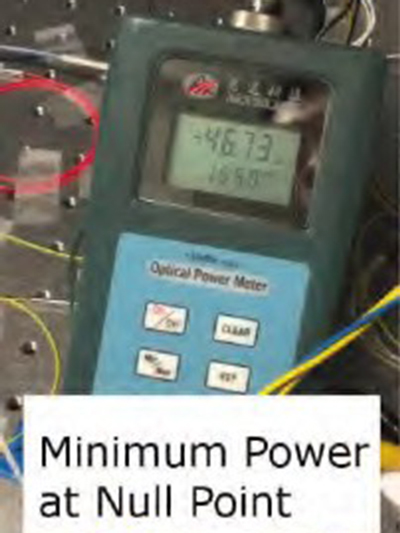
ຮູບທີ 4. ພະລັງງານຂັ້ນຕ່ຳຂອງໂມດູເລເຕີ
ອັດຕາສ່ວນການສູນພັນຂອງ Maxim DC
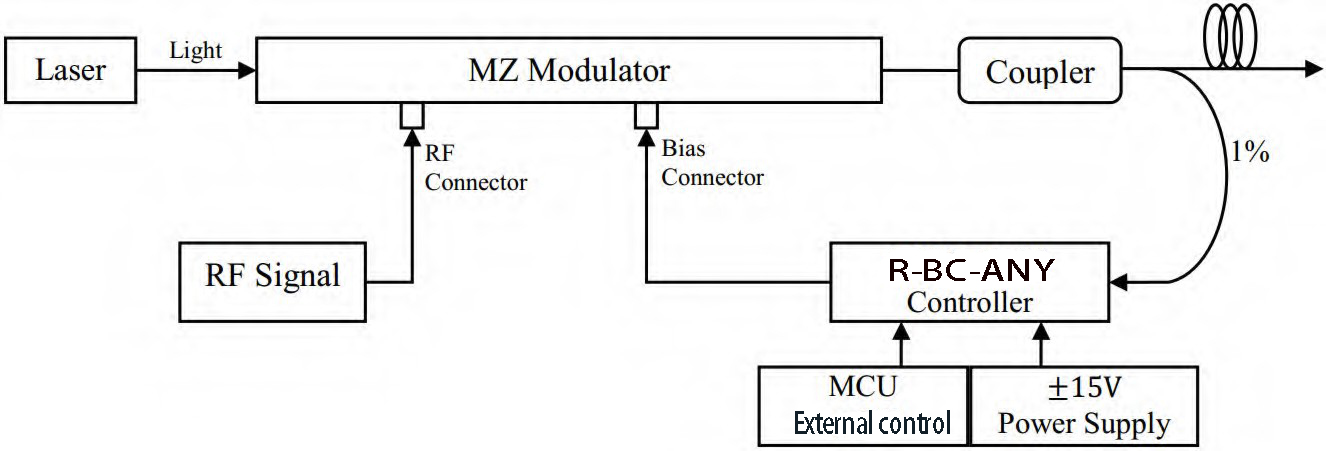
ໃນການທົດລອງນີ້, ບໍ່ມີສັນຍານ RF ຖືກນຳໃຊ້ກັບລະບົບ. ໄດ້ມີການວັດແທກການສູນເສຍໄຟຟ້າສະຖິດ DC ບໍລິສຸດ.
1. ຮູບທີ 5 ສະແດງໃຫ້ເຫັນເຖິງພະລັງງານທາງແສງຂອງຜົນຜະລິດຂອງໂມດູເລດເຕີ, ເມື່ອໂມດູເລດເຕີຖືກຄວບຄຸມຢູ່ຈຸດສູງສຸດ. ມັນສະແດງໃຫ້ເຫັນ 3.71dBm ໃນແຜນວາດ.
2. ຮູບທີ 6 ສະແດງໃຫ້ເຫັນພະລັງງານທາງແສງຂອງຜົນຜະລິດຂອງໂມດູເລດເຕີ, ເມື່ອໂມດູເລດເຕີຖືກຄວບຄຸມຢູ່ຈຸດ Null. ມັນສະແດງໃຫ້ເຫັນ -46.73dBm ໃນແຜນວາດ. ໃນການທົດລອງຕົວຈິງ, ຄ່າແຕກຕ່າງກັນປະມານ -47dBm; ແລະ -46.73 ເປັນຄ່າທີ່ໝັ້ນຄົງ.
3. ດັ່ງນັ້ນ, ອັດຕາສ່ວນການສູນເສຍ DC ທີ່ໝັ້ນຄົງທີ່ວັດແທກໄດ້ແມ່ນ 50.4dB.
ຂໍ້ກຳນົດສຳລັບອັດຕາການສູນພັນສູງ
1. ຕົວປັບລະບົບຕ້ອງມີອັດຕາສ່ວນການສູນເສຍທີ່ສູງ. ລັກສະນະຂອງຕົວປັບລະບົບຕັດສິນໃຈວ່າອັດຕາສ່ວນການສູນເສຍສູງສຸດສາມາດບັນລຸໄດ້.
2. ຕ້ອງມີການດູແລເລື່ອງໂພລາໄລເຊຊັນຂອງແສງທີ່ປ້ອນເຂົ້າຂອງໂມດູເລເຊີ. ໂມດູເລເຊີມີຄວາມອ່ອນໄຫວຕໍ່ກັບໂພລາໄລເຊຊັນ. ໂພລາໄລເຊຊັນທີ່ເໝາະສົມສາມາດປັບປຸງອັດຕາສ່ວນການສູນເສຍໄດ້ຫຼາຍກວ່າ 10dB. ໃນການທົດລອງໃນຫ້ອງທົດລອງ, ໂດຍປົກກະຕິແລ້ວຕ້ອງມີຕົວຄວບຄຸມໂພລາໄລເຊຊັນ.
3. ຕົວຄວບຄຸມໄບອັດທີ່ເໝາະສົມ. ໃນການທົດລອງອັດຕາສ່ວນການສູນເສຍຂອງ DC ຂອງພວກເຮົາ, ອັດຕາສ່ວນການສູນເສຍຂອງ DC ໄດ້ບັນລຸໄດ້ 50.4dB. ໃນຂະນະທີ່ແຜ່ນຂໍ້ມູນຂອງຜູ້ຜະລິດໂມດູເລດລະບຸພຽງແຕ່ 40dB. ເຫດຜົນຂອງການປັບປຸງນີ້ແມ່ນວ່າໂມດູເລດບາງອັນເລື່ອນໄປໄວຫຼາຍ. ຕົວຄວບຄຸມໄບອັດຂອງ Rofea R-BC-ANY ຈະອັບເດດແຮງດັນໄບອັດທຸກໆ 1 ວິນາທີເພື່ອຮັບປະກັນການຕອບສະໜອງທີ່ໄວ.
ລາຍລະອຽດສະເພາະ
| ພາລາມິເຕີ | ນາທີ | ປະເພດ | ສູງສຸດ | ໜ່ວຍ | ເງື່ອນໄຂ |
| ປະສິດທິພາບການຄວບຄຸມ | |||||
| ອັດຕາສ່ວນການສູນພັນ | MER 1 | 50 | dB | ||
| CSO2 | -55 | -65 | -70 | dBc | ຄວາມກວ້າງຂອງ Dither: 2%Vπ |
| ເວລາສະຖຽນລະພາບ | 4 | s | ຈຸດຕິດຕາມ: Null ແລະ ຈຸດສູງສຸດ | ||
| 10 | ຈຸດຕິດຕາມ: Q+ ແລະ Q- | ||||
| ໄຟຟ້າ | |||||
| ແຮງດັນໄຟຟ້າບວກ | +14.5 | +15 | +15.5 | V | |
| ກະແສໄຟຟ້າບວກ | 20 | 30 | mA | ||
| ແຮງດັນໄຟຟ້າລົບ | -15.5 | -15 | -14.5 | V | |
| ກະແສໄຟຟ້າລົບ | 2 | 4 | mA | ||
| ລະດັບແຮງດັນໄຟຟ້າອອກ | -9.57 | +9.85 | V | ||
| ຄວາມແມ່ນຍໍາຂອງແຮງດັນໄຟຟ້າອອກ | 346 | µV | |||
| ຄວາມຖີ່ຂອງ Dither | 999.95 | 1000 | 1000.05 | Hz | ລຸ້ນ: ສັນຍານ dither 1kHz |
| ຄວາມກວ້າງຂອງ Dither | 0.1%Vπ | V | ຈຸດຕິດຕາມ: Null ແລະ ຈຸດສູງສຸດ | ||
| 2%Vπ | ຈຸດຕິດຕາມ: Q+ ແລະ Q- | ||||
| ອອບຕິກ | |||||
| ພະລັງງານແສງປ້ອນຂໍ້ມູນ3 | -30 | -5 | dBm | ||
| ຄວາມຍາວຄື້ນປ້ອນຂໍ້ມູນ | 780 | 2000 | nm | ||
1. MER ໝາຍເຖິງ Modulator Extinction Ratio. ອັດຕາສ່ວນການສູນເສຍທີ່ບັນລຸໄດ້ໂດຍທົ່ວໄປແມ່ນອັດຕາສ່ວນການສູນເສຍຂອງ modulator ທີ່ລະບຸໄວ້ໃນແຜ່ນຂໍ້ມູນຂອງ modulator.
2. CSO ໝາຍເຖິງລຳດັບທີສອງປະສົມ. ເພື່ອວັດແທກ CSO ຢ່າງຖືກຕ້ອງ, ຄຸນນະພາບເສັ້ນຊື່ຂອງສັນຍານ RF, ຕົວໂມດູເລດ ແລະ ຕົວຮັບຕ້ອງໄດ້ຮັບການຮັບປະກັນ. ນອກຈາກນັ້ນ, ການອ່ານ CSO ຂອງລະບົບອາດຈະແຕກຕ່າງກັນເມື່ອເຮັດວຽກຢູ່ໃນຄວາມຖີ່ RF ທີ່ແຕກຕ່າງກັນ.
3. ກະລຸນາຮັບຊາບວ່າພະລັງງານແສງເຂົ້າບໍ່ສອດຄ່ອງກັບພະລັງງານແສງຢູ່ຈຸດໄບອັດທີ່ເລືອກ. ມັນໝາຍເຖິງພະລັງງານແສງສູງສຸດທີ່ໂມດູເລເຕີສາມາດສົ່ງອອກໄປຫາຕົວຄວບຄຸມໄດ້ເມື່ອແຮງດັນໄບອັດມີຄ່າຕັ້ງແຕ່ −Vπ ຫາ +Vπ.
ອິນເຕີເຟດຜູ້ໃຊ້
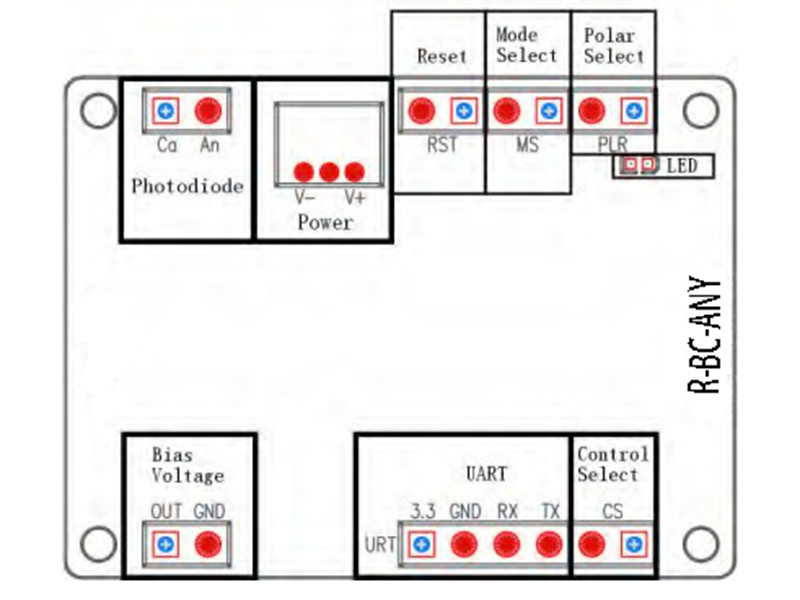
ຮູບທີ 5. ການປະກອບ
| ກຸ່ມ | ການດຳເນີນງານ | ຄຳອະທິບາຍ |
| ໂຟໂຕໄດໂອດ 1 | PD: ເຊື່ອມຕໍ່ແຄໂທດຂອງໂຟໂຕໄດໂອດ MZM | ໃຫ້ຄຳຕິຊົມກ່ຽວກັບຮູບພາບໃນປະຈຸບັນ |
| GND: ເຊື່ອມຕໍ່ Anode ຂອງ photodiode MZM | ||
| ພະລັງງານ | ແຫຼ່ງພະລັງງານສຳລັບຕົວຄວບຄຸມຄວາມລຳອຽງ | V-: ເຊື່ອມຕໍ່ເອເລັກໂຕຣດລົບ |
| V+: ເຊື່ອມຕໍ່ເອເລັກໂຕຣດບວກ | ||
| ໂພຣບກາງ: ເຊື່ອມຕໍ່ເອເລັກໂຕຣດດິນ | ||
| ຕັ້ງຄ່າໃໝ່ | ໃສ່ສາຍຈູມ ແລະ ດຶງອອກຫຼັງຈາກ 1 ວິນາທີ | ຣີເຊັດຕົວຄວບຄຸມ |
| ເລືອກໂໝດ | ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີ jumper: ໂໝດ Null; ມີ jumper: ໂໝດ Quad |
| ໂພລາ ຊີເລັກ 2 | ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີຕົວເຊື່ອມຕໍ່: ຂົ້ວບວກ; ມີຕົວເຊື່ອມຕໍ່: ຂົ້ວລົບ |
| ແຮງດັນໄຟຟ້າອະຄະຕິ | ເຊື່ອມຕໍ່ກັບພອດແຮງດັນໄຟຟ້າອະຄະຕິ MZM | OUT ແລະ GND ໃຫ້ແຮງດັນໄຟຟ້າອະຄະຕິສຳລັບໂມດູເລດເຕີ |
| LED | ເປີດຢູ່ຕະຫຼອດເວລາ | ເຮັດວຽກພາຍໃຕ້ສະພາບທີ່ໝັ້ນຄົງ |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 0.2 ວິນາທີ | ການປະມວນຜົນຂໍ້ມູນ ແລະ ການຄົ້ນຫາຈຸດຄວບຄຸມ | |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 1 ວິນາທີ | ພະລັງງານແສງປ້ອນຂໍ້ມູນອ່ອນແອເກີນໄປ | |
| ເປີດ-ປິດ ຫຼື ປິດ-ເປີດ ທຸກໆ 3 ວິນາທີ | ພະລັງງານແສງອິນພຸດແຮງເກີນໄປ | |
| UART | ໃຊ້ຕົວຄວບຄຸມຜ່ານ UART | 3.3: ແຮງດັນອ້າງອີງ 3.3V |
| GND: ພື້ນດິນ | ||
| RX: ຮັບຂອງຕົວຄວບຄຸມ | ||
| TX: ສົ່ງຕໍ່ຂອງຕົວຄວບຄຸມ | ||
| ເລືອກການຄວບຄຸມ | ໃສ່ ຫຼື ດຶງຕົວເຊື່ອມຕໍ່ອອກ | ບໍ່ມີ jumper: ການຄວບຄຸມ jumper; ມີ jumper: ການຄວບຄຸມ UART |
1. ບາງໂມດູເລດ MZ ມີໂຟໂຕໄດໂອດພາຍໃນ. ການຕັ້ງຄ່າຕົວຄວບຄຸມຄວນເລືອກລະຫວ່າງການໃຊ້ໂຟໂຕໄດໂອດຂອງຕົວຄວບຄຸມ ຫຼື ການໃຊ້ໂຟໂຕໄດໂອດພາຍໃນຂອງໂມດູເລດ. ແນະນຳໃຫ້ໃຊ້ໂຟໂຕໄດໂອດຂອງຕົວຄວບຄຸມສຳລັບການທົດລອງໃນຫ້ອງທົດລອງດ້ວຍສອງເຫດຜົນ. ຫນຶ່ງ, ໂຟໂຕໄດໂອດຂອງຕົວຄວບຄຸມໄດ້ຮັບປະກັນຄຸນນະພາບ. ສອງ, ມັນງ່າຍກວ່າທີ່ຈະປັບຄວາມເຂັ້ມຂອງແສງເຂົ້າ. ໝາຍເຫດ: ຖ້າໃຊ້ໂຟໂຕໄດໂອດພາຍໃນຂອງໂມດູເລດ, ກະລຸນາຮັບປະກັນວ່າກະແສໄຟຟ້າອອກຂອງໂຟໂຕໄດໂອດແມ່ນສັດສ່ວນກັບພະລັງງານເຂົ້າຢ່າງເຂັ້ມງວດ.
2. ຂາ Polar ໃຊ້ເພື່ອສະຫຼັບຈຸດຄວບຄຸມລະຫວ່າງຈຸດສູງສຸດ ແລະ ຈຸດສູນ (Peak) ໃນໂໝດຄວບຄຸມຈຸດສູນ (Null) (ຖືກກຳນົດໂດຍຂາ Mode Select) ຫຼື Quad+
ແລະຮູບແບບການຄວບຄຸມ Quad-in Quad. ຖ້າບໍ່ໄດ້ໃສ່ jumper ຂອງ pin polar, ຈຸດຄວບຄຸມຈະເປັນ Null ໃນໂໝດ Null ຫຼື Quad+ ໃນໂໝດ Quad. amplitude ຂອງລະບົບ RF ຍັງຈະສົ່ງຜົນກະທົບຕໍ່ຈຸດຄວບຄຸມ. ເມື່ອບໍ່ມີສັນຍານ RF ຫຼື amplitude ຂອງສັນຍານ RF ມີຂະໜາດນ້ອຍ, ຕົວຄວບຄຸມສາມາດລັອກຈຸດເຮັດວຽກໃຫ້ຖືກຕ້ອງຕາມທີ່ເລືອກໂດຍ jumper MS ແລະ PLR. ເມື່ອ amplitude ຂອງສັນຍານ RF ເກີນຂອບເຂດທີ່ແນ່ນອນ, ຂົ້ວຂອງລະບົບຈະປ່ຽນແປງ, ໃນກໍລະນີນີ້, ຫົວ PLR ຄວນຢູ່ໃນສະຖານະກົງກັນຂ້າມ, ເຊັ່ນ jumper ຄວນຖືກໃສ່ຖ້າມັນບໍ່ຖືກໃສ່ ຫຼື ດຶງອອກຖ້າມັນຖືກໃສ່.
ຄໍາຮ້ອງສະຫມັກທົ່ວໄປ
ຕົວຄວບຄຸມແມ່ນໃຊ້ງ່າຍ.
ຂັ້ນຕອນທີ 1. ເຊື່ອມຕໍ່ພອດ 1% ຂອງຕົວເຊື່ອມຕໍ່ກັບໂຟໂຕໄດໂອດຂອງຕົວຄວບຄຸມ.
ຂັ້ນຕອນທີ 2. ເຊື່ອມຕໍ່ແຮງດັນໄຟຟ້າໄບອາສຂອງຕົວຄວບຄຸມ (ຜ່ານ SMA ຫຼື ຫົວສຽບ 2.54 ມມ 2-pin) ກັບພອດໄບອາສຂອງໂມດູເລດ.
ຂັ້ນຕອນທີ 3. ສະໜອງຕົວຄວບຄຸມດ້ວຍແຮງດັນໄຟຟ້າ +15V ແລະ -15V DC.
ຂັ້ນຕອນທີ 4. ຕັ້ງຄ່າຕົວຄວບຄຸມຄືນໃໝ່ ແລະ ມັນຈະເລີ່ມເຮັດວຽກ.
ໝາຍເຫດ. ກະລຸນາຮັບປະກັນວ່າສັນຍານ RF ຂອງລະບົບທັງໝົດເປີດຢູ່ກ່ອນທີ່ຈະຕັ້ງຄ່າຕົວຄວບຄຸມຄືນໃໝ່.
ບໍລິສັດ Rofea Optoelectronics ສະເໜີສາຍຜະລິດຕະພັນເຄື່ອງປັບແສງໄຟຟ້າທາງການຄ້າ, ເຄື່ອງປັບແສງໄລຍະ, ເຄື່ອງປັບຄວາມເຂັ້ມ, ເຄື່ອງກວດຈັບແສງ, ແຫຼ່ງແສງເລເຊີ, ເລເຊີ DFB, ເຄື່ອງຂະຫຍາຍແສງ, EDFA, ເລເຊີ SLD, ການປັບຄວາມເຂັ້ມ QPSK, ເລເຊີ Pulse, ເຄື່ອງກວດຈັບແສງ, ເຄື່ອງກວດຈັບແສງແບບສົມດຸນ, ໄດຣເວີເລເຊີ, ເຄື່ອງຂະຫຍາຍແສງໄຟເບີອໍບຕິກ, ເຄື່ອງວັດແທກພະລັງງານແສງ, ເລເຊີບຣອດແບນ, ເລເຊີທີ່ສາມາດປັບໄດ້, ເຄື່ອງກວດຈັບແສງ, ໄດຣເວີເລເຊີໄດໂອດ, ເຄື່ອງຂະຫຍາຍແສງໄຟເບີ. ພວກເຮົາຍັງສະໜອງເຄື່ອງປັບແສງພິເສດຫຼາຍຢ່າງສຳລັບການປັບແຕ່ງ, ເຊັ່ນ: ເຄື່ອງປັບແສງໄລຍະ 1*4, Vpi ຕ່ຳຫຼາຍ, ແລະ ເຄື່ອງປັບແສງອັດຕາສ່ວນການສູນເສຍສູງຫຼາຍ, ສ່ວນໃຫຍ່ໃຊ້ໃນມະຫາວິທະຍາໄລ ແລະ ສະຖາບັນຕ່າງໆ.
ຫວັງວ່າຜະລິດຕະພັນຂອງພວກເຮົາຈະເປັນປະໂຫຍດຕໍ່ທ່ານ ແລະ ການຄົ້ນຄວ້າຂອງທ່ານ.


