




Ultra High Precision MZM Bias Controller ຕົວຄວບຄຸມ Bias ອັດຕະໂນມັດ


ຄຸນນະສົມບັດ
• ການຄວບຄຸມແຮງດັນ Bias ໃນ Peak/Null/Q+/Q−
• ການຄວບຄຸມແຮງດັນ Bias ໃນຈຸດທີ່ຕົນເອງມັກ
•ການຄວບຄຸມທີ່ຊັດເຈນທີ່ສຸດ: ອັດຕາສ່ວນການສູນພັນສູງສຸດ 50dB ໃນໂຫມດ Null;
ຄວາມຖືກຕ້ອງ ±0.5◦ ໃນໂໝດ Q+ ແລະ Q-
• ຄວາມກວ້າງໃຫຍ່ໄພສານຕໍ່າ:
0.1% Vπ ທີ່ໂຫມດ NULL ແລະໂຫມດ PEAK
2% Vπ ຢູ່ໂໝດ Q+ ແລະ ໂໝດ Q-
• ຄວາມໝັ້ນຄົງສູງ: ດ້ວຍການປະຕິບັດດິຈິຕອນຢ່າງສົມບູນ
• ຂະໜາດນ້ອຍ: 40mm(W) × 30mm(D) × 10mm(H)
•ງ່າຍຕໍ່ການນໍາໃຊ້: ການດໍາເນີນງານຄູ່ມືດ້ວຍ mini jumper;
ການດໍາເນີນງານ OEM ທີ່ມີຄວາມຍືດຫຍຸ່ນຜ່ານ MCU UART2
•ສອງໂຫມດທີ່ແຕກຕ່າງກັນເພື່ອສະຫນອງແຮງດັນ bias: a. ການຄວບຄຸມ bias ອັດຕະໂນມັດ
ຂ.ຜູ້ໃຊ້ກໍານົດແຮງດັນ bias

ຄໍາຮ້ອງສະຫມັກ
• LiNbO3 ແລະໂມດູນ MZ ອື່ນໆ
• Digital NRZ, RZ
• ຄໍາຮ້ອງສະຫມັກກໍາມະຈອນ
•ລະບົບກະແຈກກະຈາຍ Brillouin ແລະເຊັນເຊີ optical ອື່ນໆ
• ເຄື່ອງສົ່ງສັນຍານ CATV
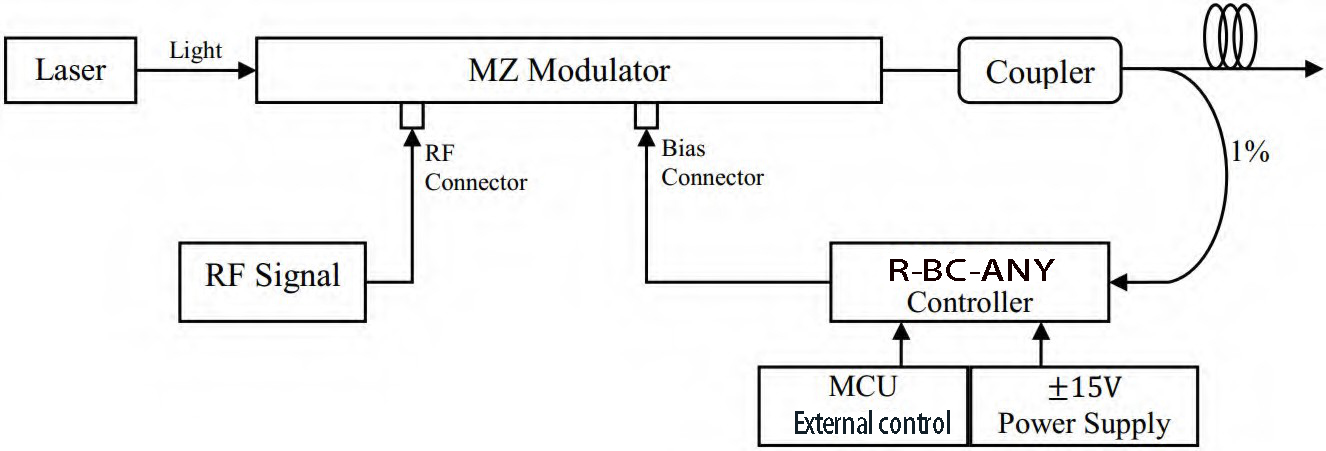
ການປະຕິບັດ
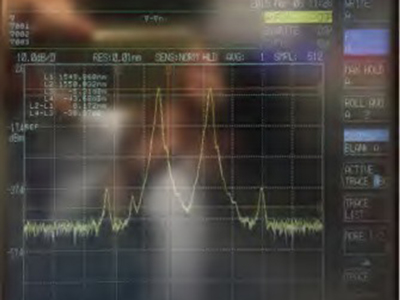
ຮູບທີ 1. ການສະກັດກັ້ນຜູ້ຂົນສົ່ງ
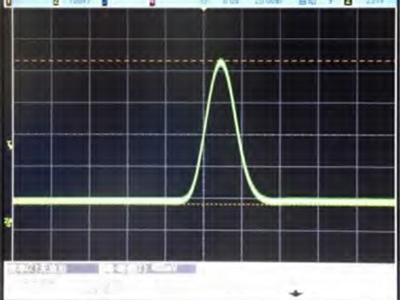
ຮູບທີ 2. ການຜະລິດກໍາມະຈອນ

ຮູບທີ 3. Modulator max power
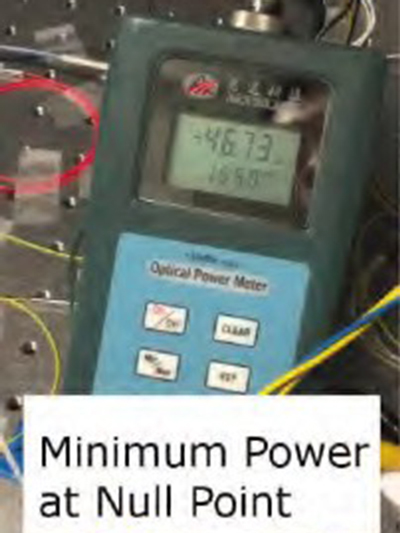
ຮູບທີ 4. Modulator ພະລັງງານຕໍາ່ສຸດທີ່
ອັດຕາສ່ວນການສູນພັນ DC ສູງສຸດ
ໃນການທົດລອງນີ້, ບໍ່ມີສັນຍານ RF ຖືກນໍາໃຊ້ກັບລະບົບ.Pure DC extinciton ໄດ້ຖືກວັດແທກ.
1. ຮູບທີ 5 ສະແດງໃຫ້ເຫັນເຖິງພະລັງງານ optical ຂອງຜົນຜະລິດ modulator, ເມື່ອ modulator ຄວບຄຸມຢູ່ທີ່ຈຸດສູງສຸດ.ມັນສະແດງ 3.71dBm ໃນແຜນວາດ.
2. ຮູບທີ 6 ສະແດງໃຫ້ເຫັນພະລັງງານ optical ຂອງຜົນຜະລິດ modulator, ເມື່ອ modulator ຄວບຄຸມຢູ່ທີ່ຈຸດ Null.ມັນສະແດງໃຫ້ເຫັນ -46.73dBm ໃນແຜນວາດ.ໃນການທົດລອງຕົວຈິງ, ມູນຄ່າແຕກຕ່າງກັນປະມານ -47dBm;ແລະ -46.73 ເປັນມູນຄ່າຄົງທີ່.
3. ດັ່ງນັ້ນ, ອັດຕາສ່ວນການສູນພັນ DC ທີ່ຫມັ້ນຄົງທີ່ວັດແທກແມ່ນ 50.4dB.
ຄວາມຕ້ອງການສໍາລັບອັດຕາສ່ວນການສູນພັນສູງ
1. ໂມດູນລະບົບຕ້ອງມີອັດຕາສ່ວນການສູນພັນສູງ.ລັກສະນະຂອງ modulator ລະບົບຕັດສິນໃຈອັດຕາສ່ວນການສູນພັນສູງສຸດສາມາດບັນລຸໄດ້.
2. Polarization ຂອງແສງສະຫວ່າງ input modulator ຕ້ອງໄດ້ຮັບການດູແລ.Modulators ມີຄວາມອ່ອນໄຫວຕໍ່ກັບ polarization.Polarization ທີ່ເຫມາະສົມສາມາດປັບປຸງອັດຕາສ່ວນການສູນພັນຫຼາຍກວ່າ 10dB.ໃນການທົດລອງຫ້ອງທົດລອງ, ປົກກະຕິແລ້ວແມ່ນຕ້ອງການຕົວຄວບຄຸມ polarization.
3. ຕົວຄວບຄຸມອະຄະຕິທີ່ຖືກຕ້ອງ.ໃນການທົດລອງອັດຕາສ່ວນການສູນພັນ DC ຂອງພວກເຮົາ, ອັດຕາສ່ວນການສູນພັນ 50.4dB ໄດ້ບັນລຸໄດ້.ໃນຂະນະທີ່ແຜ່ນຂໍ້ມູນຂອງ modulator ຜະລິດພຽງແຕ່ລາຍຊື່ 40dB.ເຫດຜົນຂອງການປັບປຸງນີ້ແມ່ນວ່າບາງ modulators drift ໄວຫຼາຍ.Rofea R-BC-ANY bias controllers ອັບເດດແຮງດັນ bias ທຸກໆ 1 ວິນາທີເພື່ອຮັບປະກັນການຕອບໂຕ້ໄວ.
ຂໍ້ມູນຈໍາເພາະ
| ພາລາມິເຕີ | ຕ່ຳສຸດ | ພິມ | ສູງສຸດ | ໜ່ວຍ | ເງື່ອນໄຂ |
| ການຄວບຄຸມປະສິດທິພາບ | |||||
| ອັດຕາສ່ວນການສູນພັນ | MER 1 | 50 | dB | ||
| CSO2 | −55 | −65 | −70 | dBc | ຄວາມກວ້າງໃຫຍ່ໄພສານ: 2%Vπ |
| ເວລາສະຖຽນລະພາບ | 4 | s | ຈຸດຕິດຕາມ: Null & Peak | ||
| 10 | ຈຸດຕິດຕາມ: Q+ & Q- | ||||
| ໄຟຟ້າ | |||||
| ແຮງດັນໄຟຟ້າໃນທາງບວກ | +14.5 | +15 | +15.5 | V | |
| ກະແສໄຟຟ້າໃນທາງບວກ | 20 | 30 | mA | ||
| ແຮງດັນໄຟຟ້າລົບ | -15.5 | -15 | -14.5 | V | |
| ກະແສໄຟຟ້າລົບ | 2 | 4 | mA | ||
| ຊ່ວງແຮງດັນຂາອອກ | -9.57 | +9.85 | V | ||
| ຄວາມແມ່ນຍໍາຂອງແຮງດັນຂາອອກ | 346 | µV | |||
| ຄວາມຖີ່ Dither | 999.95 | 1000 | 1000.05 | Hz | ລຸ້ນ: 1kHz dither signal |
| ຄວາມກວ້າງໃຫຍ່ໄພສານ | 0.1%Vπ | V | ຈຸດຕິດຕາມ: Null & Peak | ||
| 2%Vπ | ຈຸດຕິດຕາມ: Q+ & Q- | ||||
| Optical | |||||
| ພະລັງງານ optical ປ້ອນຂໍ້ມູນ 3 | -30 | -5 | dBm | ||
| ຄວາມຍາວຄື້ນຂອງວັດສະດຸປ້ອນ | 780 | 2000 | nm | ||
1. MER ອ້າງອີງເຖິງ Modulator Extinction Ratio.ອັດຕາສ່ວນການສູນພັນທີ່ບັນລຸໄດ້ໂດຍປົກກະຕິແມ່ນອັດຕາສ່ວນການສູນພັນຂອງໂມດູນເຕີທີ່ລະບຸໄວ້ໃນເອກະສານຂໍ້ມູນໂມດູນ.
2. CSO ຫມາຍເຖິງການປະກອບລໍາດັບທີສອງ.ເພື່ອວັດແທກ CSO ຢ່າງຖືກຕ້ອງ, ຄຸນນະພາບເສັ້ນຊື່ຂອງສັນຍານ RF, modulators ແລະ receivers ຕ້ອງໄດ້ຮັບການຮັບປະກັນ.ນອກຈາກນັ້ນ, ການອ່ານ CSO ຂອງລະບົບອາດຈະແຕກຕ່າງກັນເມື່ອແລ່ນຢູ່ໃນຄວາມຖີ່ RF ທີ່ແຕກຕ່າງກັນ.
3. ກະລຸນາຮັບຊາບວ່າພະລັງງານ optical input ບໍ່ກົງກັນກັບພະລັງງານ optical ຢູ່ຈຸດ bias ເລືອກ.ມັນຫມາຍເຖິງພະລັງງານ optical ສູງສຸດທີ່ modulator ສາມາດສົ່ງອອກໄປຫາຕົວຄວບຄຸມໃນເວລາທີ່ແຮງດັນ bias ຕັ້ງແຕ່ −Vπ ຫາ +Vπ .
ການໂຕ້ຕອບຜູ້ໃຊ້
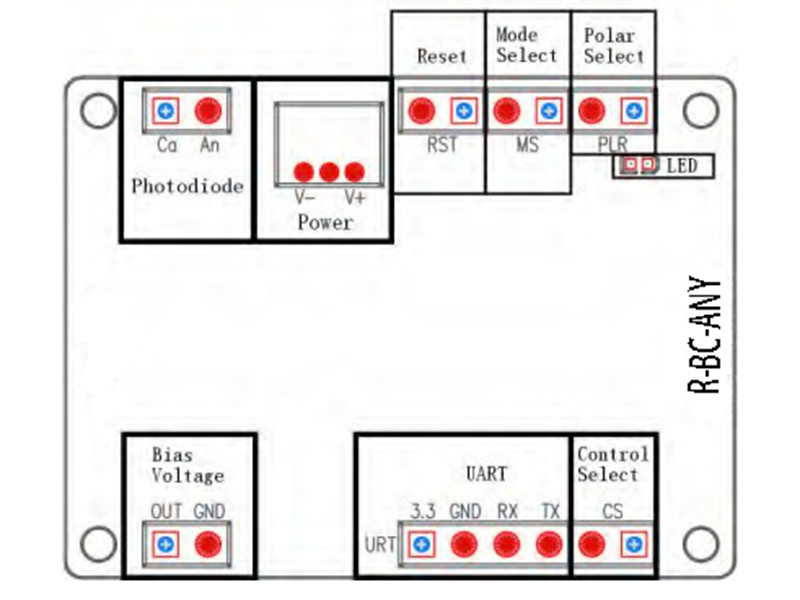
ຮູບ5.ສະພາແຫ່ງ
| ກຸ່ມ | ການດໍາເນີນງານ | ຄໍາອະທິບາຍ |
| Photodiode 1 | PD: ເຊື່ອມຕໍ່ MZM photodiode's Cathode | ໃຫ້ຄໍາຄຶດຄໍາເຫັນ photocurrent |
| GND: ເຊື່ອມຕໍ່ MZM photodiode's Anode | ||
| ພະລັງງານ | ແຫຼ່ງພະລັງງານສໍາລັບຕົວຄວບຄຸມອະຄະຕິ | V-: ເຊື່ອມຕໍ່ electrode ລົບ |
| V+: ເຊື່ອມຕໍ່ electrode ບວກ | ||
| ກາງ probe: ເຊື່ອມຕໍ່ electrode ດິນ | ||
| ຣີເຊັດ | ໃສ່ jumper ແລະດຶງອອກຫຼັງຈາກ 1 ວິນາທີ | ຣີເຊັດຕົວຄວບຄຸມ |
| ເລືອກໂໝດ | ໃສ່ຫຼືດຶງ jumper ອອກ | ບໍ່ມີ jumper: ໂຫມດ Null;ມີ jumper: ໂຫມດ Quad |
| Polar ເລືອກ2 | ໃສ່ຫຼືດຶງ jumper ອອກ | ບໍ່ມີ jumper: ຂົ້ວບວກ;ມີ jumper: ຂົ້ວລົບ |
| ແຮງດັນ Bias | ເຊື່ອມຕໍ່ກັບພອດແຮງດັນ Bias MZM | OUT ແລະ GND ສະຫນອງແຮງດັນຄວາມລໍາອຽງສໍາລັບຕົວຄວບຄຸມ |
| LED | ຢ່າງຕໍ່ເນື່ອງ | ເຮັດວຽກພາຍໃຕ້ລັດທີ່ຫມັ້ນຄົງ |
| ເປີດ-ປິດ ຫຼືປິດ-ເປີດທຸກໆ 0.2ວິ | ການປະມວນຜົນຂໍ້ມູນແລະການຊອກຫາຈຸດຄວບຄຸມ | |
| ເປີດ-ປິດ ຫຼືປິດ-ເປີດທຸກໆ 1ວິ | ພະລັງງານ optical ຂາເຂົ້າອ່ອນເກີນໄປ | |
| ເປີດ-ປິດ ຫຼືປິດ-ເປີດທຸກໆ 3ວິ | ພະລັງງານ optical ຂາເຂົ້າແມ່ນແຮງເກີນໄປ | |
| UART | ປະຕິບັດການຄວບຄຸມຜ່ານ UART | 3.3: 3.3V ແຮງດັນໄຟຟ້າອ້າງອີງ |
| GND: ດິນ | ||
| RX: ຮັບຕົວຄວບຄຸມ | ||
| TX: ການສົ່ງຂອງຕົວຄວບຄຸມ | ||
| ຄວບຄຸມເລືອກ | ໃສ່ຫຼືດຶງ jumper ອອກ | ບໍ່ມີ jumper: ການຄວບຄຸມ jumper;ກັບ jumper: ການຄວບຄຸມ UART |
1. ບາງໂມດູນ MZ ມີ photodiodes ພາຍໃນ.ການຕັ້ງຄ່າຕົວຄວບຄຸມຄວນຈະຖືກເລືອກລະຫວ່າງການໃຊ້ photodiode ຂອງຜູ້ຄວບຄຸມ ຫຼືການໃຊ້ photodiode ພາຍໃນຂອງຕົວຄວບຄຸມ.ມັນແນະນໍາໃຫ້ໃຊ້ photodiode ຂອງຕົວຄວບຄຸມສໍາລັບການທົດລອງຫ້ອງທົດລອງສໍາລັບສອງເຫດຜົນ.ກ່ອນອື່ນ ໝົດ, photodiode ຄວບຄຸມໄດ້ຮັບປະກັນຄຸນນະພາບ.ອັນທີສອງ, ມັນງ່າຍຕໍ່ການປັບຄວາມເຂັ້ມຂອງແສງເຂົ້າ.ຫມາຍເຫດ: ຖ້າຫາກວ່າການນໍາໃຊ້ photodiode ພາຍໃນຂອງ modulator, ກະລຸນາເຮັດໃຫ້ແນ່ໃຈວ່າປະຈຸບັນຜົນຜະລິດຂອງ photodiode ແມ່ນສັດສ່ວນຢ່າງເຂັ້ມງວດກັບພະລັງງານປ້ອນຂໍ້ມູນ.
2. Polar pin ແມ່ນໃຊ້ເພື່ອສະຫຼັບຈຸດຄວບຄຸມລະຫວ່າງ Peak ແລະ Null ໃນໂໝດຄວບຄຸມ Null (ກຳນົດໂດຍ Mode Select pin) ຫຼື Quad+
ແລະ Quad- ໃນຮູບແບບການຄວບຄຸມ Quad.ຖ້າ jumper ຂອງ polar pin ບໍ່ຖືກໃສ່, ຈຸດຄວບຄຸມຈະເປັນ Null ໃນ Null mode ຫຼື Quad+ ໃນ Quad mode.ຄວາມກວ້າງຂອງລະບົບ RF ຍັງຈະສົ່ງຜົນກະທົບຕໍ່ຈຸດຄວບຄຸມ.ເມື່ອບໍ່ມີສັນຍານ RF ຫຼືຄວາມກວ້າງຂອງສັນຍານ RF ມີຂະຫນາດນ້ອຍ, ຜູ້ຄວບຄຸມສາມາດລັອກຈຸດເຮັດວຽກເພື່ອແກ້ໄຂຈຸດທີ່ເລືອກໂດຍ MS ແລະ PLR jumper.ເມື່ອຄວາມກວ້າງຂອງສັນຍານ RF ເກີນຂອບເຂດທີ່ແນ່ນອນ, ຂົ້ວຂອງລະບົບຈະມີການປ່ຽນແປງ, ໃນກໍລະນີນີ້, ຫົວ PLR ຄວນຢູ່ໃນສະພາບກົງກັນຂ້າມ, ຫມາຍຄວາມວ່າ jumper ຄວນຖືກໃສ່ຖ້າມັນບໍ່ແມ່ນຫຼືດຶງອອກຖ້າມັນຖືກໃສ່.
ຄໍາຮ້ອງສະຫມັກທົ່ວໄປ
ຕົວຄວບຄຸມແມ່ນງ່າຍທີ່ຈະໃຊ້.
ຂັ້ນຕອນທີ1.ເຊື່ອມຕໍ່ 1% ພອດຂອງ coupler ກັບ photodiode ຂອງຕົວຄວບຄຸມ.
ຂັ້ນຕອນທີ2.ເຊື່ອມຕໍ່ແຮງດັນທີ່ອອກແຮງບິດຂອງຕົວຄວບຄຸມ (ຜ່ານ SMA ຫຼື 2.54mm 2-pin header) ໄປຫາພອດອະຄະຕິຂອງໂມດູເລເຕີ.
ຂັ້ນຕອນທີ3.ໃຫ້ເຄື່ອງຄວບຄຸມທີ່ມີແຮງດັນໄຟຟ້າ +15V ແລະ -15V DC.
ຂັ້ນຕອນທີ4.ຣີເຊັດຕົວຄວບຄຸມ ແລະມັນຈະເລີ່ມເຮັດວຽກ.
ຫມາຍເຫດ.ກະລຸນາຮັບປະກັນວ່າສັນຍານ RF ຂອງລະບົບທັງໝົດເປີດຢູ່ກ່ອນທີ່ຈະຣີເຊັດຕົວຄວບຄຸມ.
Rofea Optoelectronics ສະຫນອງສາຍຜະລິດຕະພັນຂອງໂມດູນ Electro-optic ການຄ້າ, ຕົວຄວບຄຸມໄລຍະ, ຕົວຄວບຄຸມຄວາມເຂັ້ມ, ເຄື່ອງກວດຈັບພາບ, ແຫຼ່ງແສງເລເຊີ, ເລເຊີ DFB, ເຄື່ອງຂະຫຍາຍແສງ, EDFA, ເລເຊີ SLD, ໂມດູນ QPSK, ເລເຊີ Pulse, ເຄື່ອງກວດຈັບແສງ, ເຄື່ອງກວດຈັບພາບທີ່ສົມດູນ, ໄດເວີເລເຊີ , ເຄື່ອງຂະຫຍາຍສຽງໃຍແກ້ວນໍາແສງ, ເຄື່ອງວັດແທກພະລັງງານ Optical, ເລເຊີ Broadband, ເລເຊີທີ່ສາມາດປັບໄດ້, ເຄື່ອງກວດຈັບແສງ, ໄດເວີເລເຊີ, ເຄື່ອງຂະຫຍາຍໄຟເບີ.ພວກເຮົາຍັງສະຫນອງຕົວປັບຕົວພິເສດຫຼາຍຢ່າງສໍາລັບການປັບແຕ່ງ, ເຊັ່ນ 1*4 ໄລຍະອາເລໂມດູນ, Vpi ຕ່ໍາສຸດ, ແລະຕົວຄວບຄຸມອັດຕາສ່ວນການສູນພັນສູງສຸດ, ຖືກນໍາໃຊ້ຕົ້ນຕໍໃນມະຫາວິທະຍາໄລແລະສະຖາບັນ.
ຫວັງວ່າຜະລິດຕະພັນຂອງພວກເຮົາຈະເປັນປະໂຫຍດສໍາລັບທ່ານແລະການຄົ້ນຄວ້າຂອງທ່ານ.

