




Silicon optical modulator for FMCW
As we all know, one of the most important components in FMCW-based Lidar systems is the high linearity modulator. Its working principle is shown in the following figure: Using DP-IQ modulator based single sideband modulation (SSB), the upper and lower MZM work at null point, on the road and down the side band of wc+wm and WC-WM, wm is the modulation frequency, but at the same time the lower channel introduces 90 degrees phase difference, and finally the light of WC-WM is cancelled, only the frequency shift term of wc+wm. In Figure b, LR blue is the local FM chirp signal, RX orange is the reflected signal, and due to the Doppler effect, the final beat signal produces f1 and f2.
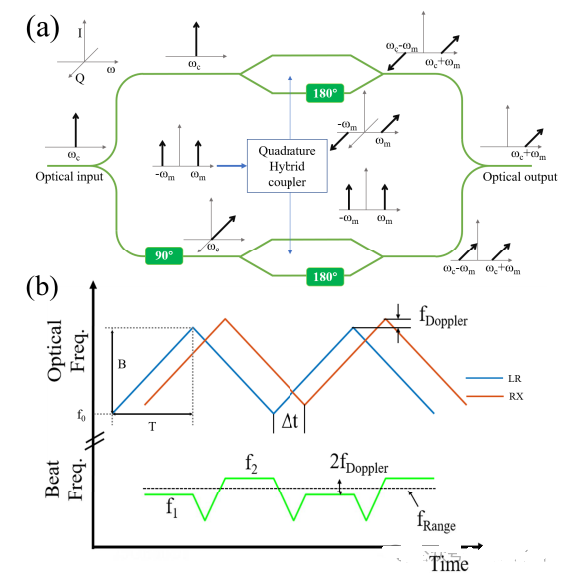
The distance and speed are:

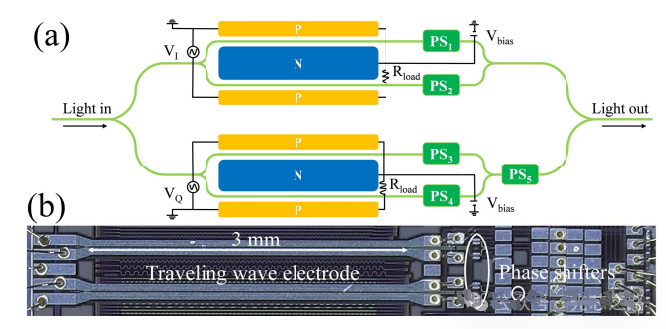
The following is an article published by Shanghai Jiaotong University in 2021, about SSB generators that implement FMCW based on silicon light modulators.
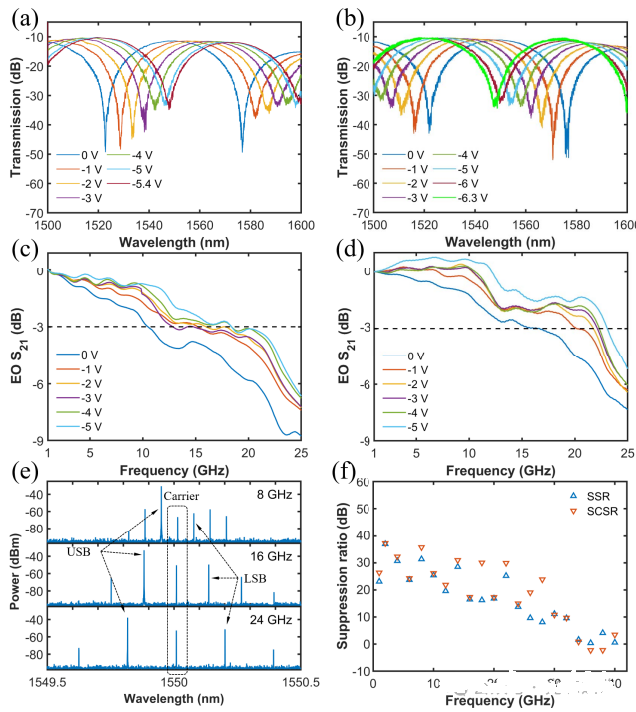
The performance of MZM is shown as follows: The performance difference of upper and lower arm modulators is relatively large. The carrier sideband rejection ratio is different with the frequency modulation rate, and the effect will become worse as the frequency increases.
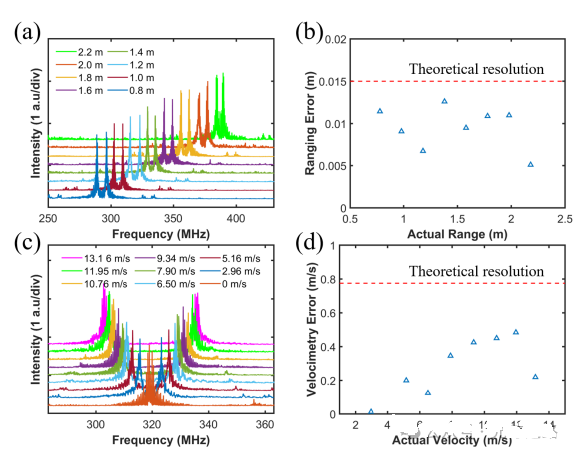
In the following figure, the test results of the Lidar system show that a/b is the beat signal at the same speed and at different distances, and c/d is the beat signal at the same distance and at different speeds. The test results reached 15mm and 0.775m /s.
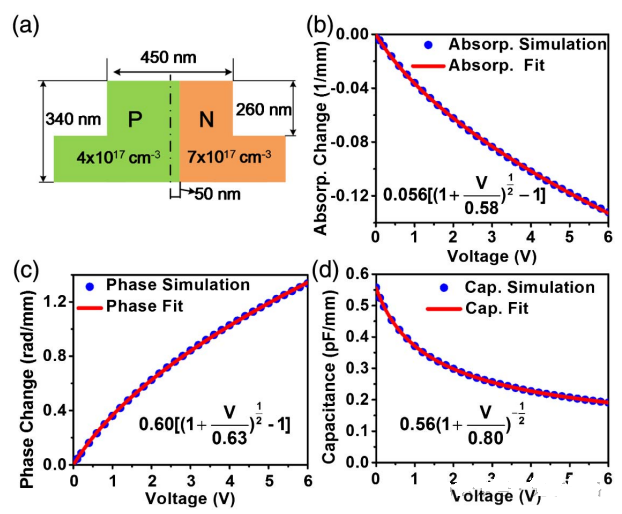
Here, only the application of silicon optical modulator for FMCW is discussed. In reality, the effect of silicon optical modulator is not as good as that of LiNO3 modulator, mainly because in silicon optical modulator, the phase change/absorption coefficient/junction capacitance is non-linear with the voltage change, as shown in the figure below:
That is,
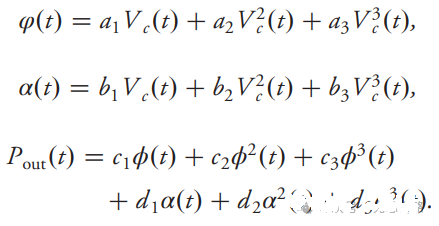
The output power relationship of the modulator system is as follows
The result is a high order detuning:
These will cause the broadening of the beat frequency signal and the decrease of the signal-to-noise ratio. So what is the way to improve the linearity of the silicon light modulator? Here we only discuss the characteristics of the device itself, and do not discuss the compensation scheme using other auxiliary structures.
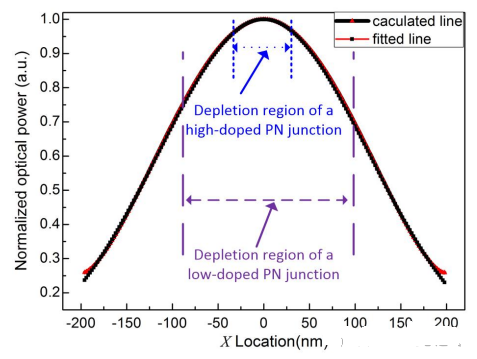
One of the reasons for the non-linearity of modulation phase with voltage is that the light field in the waveguide is in different distribution of heavy and light parameters and the phase change rate is different with the change of voltage. As shown in the following picture. The depletion region with heavy interference changes less than that with light interference.
The following figure shows the change curves of the third-order intermodulation distortion TID and the second-order harmonic distortion SHD with the concentration of the clutter, that is, the modulation frequency. It can be seen that the suppression ability of the detuning for heavy clutter is higher than that for light clutter. Therefore, remixing helps to improve linearity.

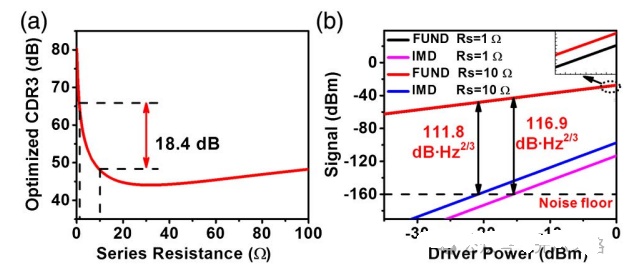
The above is equivalent to considering C in the RC model of MZM, and the influence of R should also be considered. The following is the change curve of CDR3 with the series resistance. It can be seen that the smaller the series resistance, the larger the CDR3.
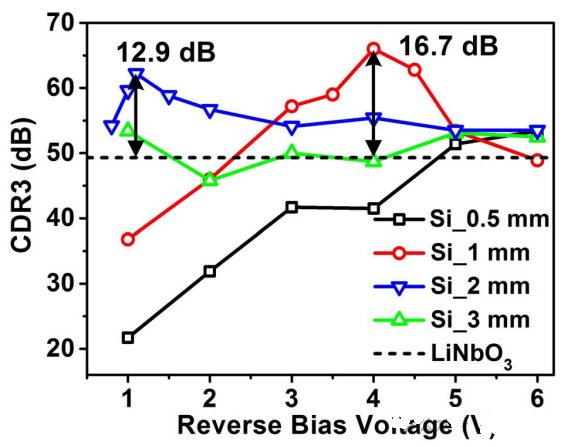
Last but not least, the effect of the silicon modulator is not necessarily worse than that of LiNbO3. As shown in the figure below, CDR3 of the silicon modulator will be higher than that of LiNbO3 in the case of full bias through reasonable design of the structure and length of the modulator. Test conditions remain consistent.
In summary, the structural design of the silicon light modulator can only be mitigated, not cured, and whether it can really be used in the FMCW system needs experimental verification, if it can be really, then it can achieve transceiver integration, which has advantages for large-scale cost reduction.
Post time: Mar-18-2024